Глава 7. Подводные аппараты
Этапы развития
Долгое время подводные лодки имели исключительно военное назначение и входили только в состав военно-морских флотов. Скрытное передвижение под водой позволяло эффективно использовать их для боевых действий против надводных кораблей.
Это преимущество подводных лодок перед военными кораблями других классов сохраняется и в наши дни.
За прошедшие полвека технический прогресс способствовал быстрому росту мощи подводного флота, увеличению его боевых возможностей в вечном диалектическом споре между "оружием" и "броней". Появление атомных энергетических установок сделало субмарины поистине подводными кораблями. Предшественник подводного атомохода - дизель-аккумуляторная подводная лодка - не может долго находиться под водой. Израсходовав запас энергии, она вынуждена всплывать для подзарядки аккумуляторных батарей. Атомные же двигатели сделали подводную лодку по-настоящему автономной (она может не всплывать на поверхность месяцами) и быстроходной: дальность ее плавания практически неограниченна.
Однако как дизель-аккумуляторные, так и атомные подводные лодки военно-морских флотов ненамного расширили наши знания о подводном мире. И это неудивительно, ведь они громоздки, в сущности, слепы под водой и погружаются на относительно небольшие глубины; главная их цель - передвигаться из одной точки в другую.
За свою историю человечество создало многочисленные средства для проникновения в подводный мир - от легководолазного снаряжения, в котором человек способен погрузиться на несколько десятков метров, и до батискафа, на котором отважные исследователи достигли многокилометровых глубин.
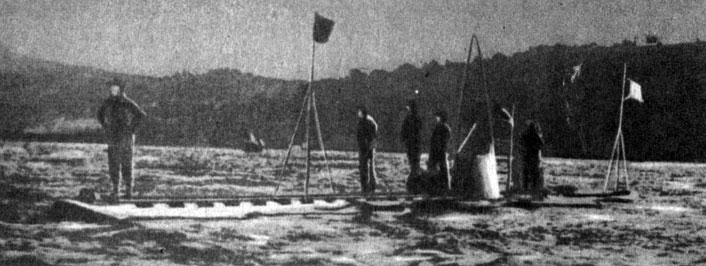
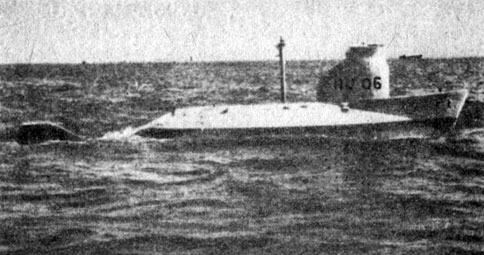
Подводная лодка 'Гюстав Зэдэ' на поверхности. В июне 1899 г. на борту этой подводной лодки впервые в истории глава государства - президент Франции Лубэ - погрузился под воду
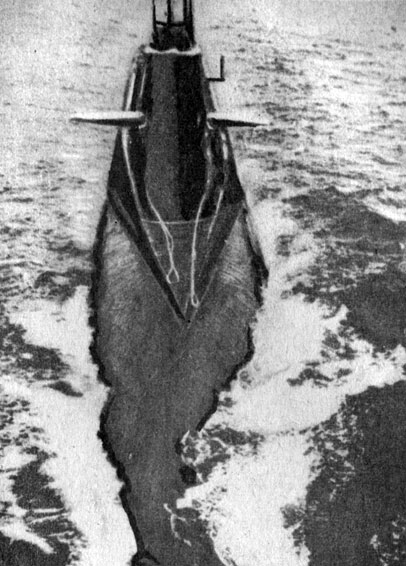
Атомная подводная лодка 'Редутабль'
Мы не будем рассматривать здесь эволюцию подводных лодок военного назначения. Нас интересует, как шло развитие научно-исследовательских подводных аппаратов, в которых экипаж защищен от колоссального давления воды прочным стальным корпусом и дышит обычным воздухом с нормальным атмосферным давлением.
Мы могли бы начать с эскизов Леонардо да Винчи, с наивных гравюр средневековья, которые свидетельствуют о давней мечте человека проникнуть в подводный мир. Но автор не ставит перед собой задачу подробно рассказать об освоении глубин с незапамятных времен. Поэтому вернемся в современность, к событиям, происходившим несколько десятилетий назад.
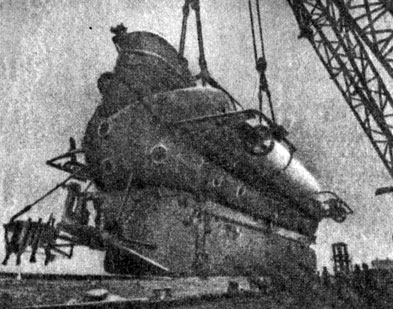
История глубоководных погружений в подводных аппаратах начинается с 1930 г.- со смелых экспериментов исследователей Мирового океана У. Биба и О. Бартона. После долгих раздумий над конструкцией своего подводного аппарата они избрали для него форму сфероида. Сфероид должен был погружаться на глубину на толстом стальном тросе.
И вот батисфера построена и поднята на палубу специально оборудованного судна. Ее диаметр - 1,45 м, толщина стенок - 3 см. В июне 1930 г. У. Биб и О. Бартон погрузились в ней на глубину 490 м, а в 1934 г. - на 920 м. Затем в 1948 г. О. Бартон достиг глубины 1360 м. Это был замечательный успех для того времени, выдающийся подвиг исследователя! Но... вместе с тем - и предел глубин, которых можно достичь, используя привязной аппарат: колоссальный вес многокилометрового стального троса и самой батисферы требует специального судна большого водоизмещения и внушительных финансовых затрат.
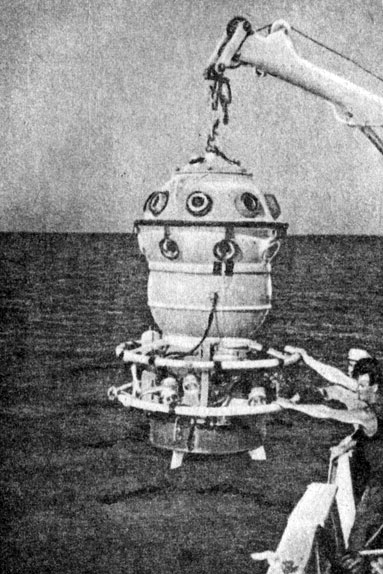
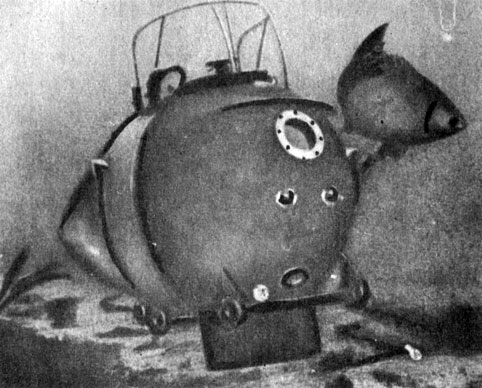
Гидростат системы Галлеаци, используемый для наблюдения за подводной средой
Где же выход из создавшегося тупика? Очевидно, нужно освободиться от стального троса, на котором опускается подводный аппарат, т. е. сделать его автономным.
Итак, автономный обитаемый аппарат. Какова же должна быть его конструкция? Можно, конечно, пойти по пути создания аппаратов, представляющих собой миниатюрные копии военных подводных лодок (экипаж не более двух-трех человек) с прочным корпусом, с цистернами, обеспечивающими погружение и всплытие.
Как известно, такие цистерны бывают двух видов. Одни полностью заполняются водой при погружении - это балластные цистерны. В надводном же положении они пусты, благодаря чему и удерживают лодку на плаву. С помощью другого вида цистерн - они называются уравнительными - подводной лодке придают нулевую плавучесть, регулируя их заполнение водой. Балластные цистерны, всегда заполненные водой в подводном положении, не боятся давления, поэтому они находятся в легком корпусе и имеют тонкие стенки, а уравнительные цистерны, заполненные водой лишь частично, размещаются в прочном корпусе.
Вода из цистерн может удаляться при помощи сжатого воздуха или откачиваться помпами. Помпами перекачивается вода из одних цистерн в другие - например, для дифферентовки. Однако сжатый воздух используется только до некоторого предела глубин. Объясняется это тем, что с увеличением глубины приходится увеличивать и давление воздуха, которым продуваются цистерны. Но чем больше сжимается воздух, тем меньший объем он занимает, а это значит, что для продувки нужно иметь огромные запасы воздуха под весьма значительным давлением. А на глубине 6000 м плотность воздуха практически становится равной плотности воды, и, таким образом, вытеснение воздухом воды из цистерн уже не дает увеличения плавучести.
Спуск батискафа 'Архимед' на воду
Описанная система погружения и всплытия с помощью продувки балластных цистерн сжатым воздухом традиционно использовалась на обычных подводных лодках, погружавшихся на глубины до 300 м. Конечно, современные военные подводные лодки погружаются на большие глубины. Но еще больше увеличить предел глубин - если только не будет найдено более легкого, чем сталь, но обладающего такой же сопротивляемостью материала - с помощью этой системы погружения и всплытия уже нельзя. Здесь надо было найти принципиально новое техническое решение.
Конструкцию и специальное оборудование глубоководного подводного аппарата - батискафа - разработал профессор О. Пиккар. Экипаж батискафа размещался в герметичной сфере - гондоле, имеющей благодаря своим толстым стальным стенкам и весу находящегося в ней оборудования отрицательную плавучесть. Необходимая же плавучесть батискафа обеспечивалась за счет поплавка, заполненного бензином. Эту плавучесть можно было регулировать, и, таким образом, при нулевой плавучести батискаф парил в воде, как дирижабль в атмосфере. Батискаф Пиккара совершил самые глубоководные в мире погружения, его рекорды не превзойдены до сих пор.
И хотя большие габариты и особенности конструкции этого аппарата осложняют его эксплуатацию, батискаф до сих пор остается единственным аппаратом, способным доставить исследователей в любую точку океанского дна.
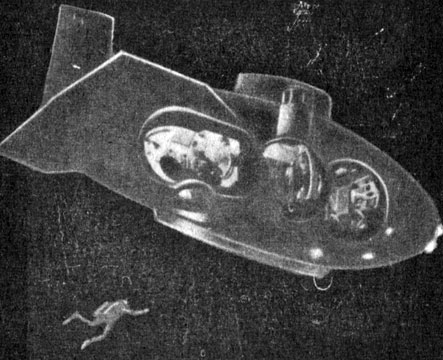
В 1956 г. в морские глубины ушло "ныряющее блюдце" Жака-Ива Кусто. Его появление ознаменовало новый этап в развитии подводных обитаемых аппаратов. Прочный корпус "блюдца" обладал положительной плавучестью. Глубина его погружения, правда, не превышала 300 м (позже она увеличилась до 350 м), но зато аппарат имел хорошую маневренность, небольшой вес и малые габариты.
Дальнейшему прогрессу в создании подводных самоходных обитаемых аппаратов способствовало появление новых материалов на основе эпоксидных смол с наполнителем из стеклянных шариков. Материалы эти имеют малый удельный вес, но в то же время обладают высокой прочностью. Применение их позволило резко снизить вес корпуса подводных аппаратов.
Существующие на сегодняшний день подводные самоходные обитаемые аппараты, используемые в научных исследованиях и при промышленной эксплуатации ресурсов Мирового океана, созданы в 1960 - 1970 гг. на основе опыта, накопленного в последние десятилетия. Водоизмещение этих аппаратов колеблется от 3 до 70 т, но, как правило, не превышает 20 т.
Нелегко хотя бы вкратце рассказать об особенностях конструкции подводных аппаратов и разнообразных задачах, выполняемых ими.
Ни один из этих аппаратов, имеющих в качестве балласта твердые вещества (иногда в дополнение к твердому балласту используются и балластные цистерны, продуваемые сжатым воздухом), практически не может погрузиться ниже 3000 м. Однако - это выяснилось совсем недавно,- построив корпус аппарата из более легких материалов и тем самым снизив его вес, мы можем увеличить глубину погружения до 6000 м*. Так, выгодно заменить сталь более легким, но не менее прочным титаном. Ученые работают над созданием и других конструкционных материалов.
* (6-километровые глубины - очень важный рубеж, поскольку 98% площади дна Мирового океана имеет меньшие глубины.- Прим. авт.)
Нужны ли подводные самоходные обитаемые аппараты?
Вопрос этот может показаться странным - ведь за последние десять лет во многих странах мира построено более полусотни различных подводных аппаратов (впрочем, большая часть из них принадлежит США). Средства, которые были выделены на разработку проектов, строительство и проведение экспериментов, могут быть оправданы только в том случае, если их использование дает экономический эффект. Но если мы попытаемся проанализировать имеющуюся информацию, то с удивлением убедимся, что самоходные обитаемые аппараты почти не применялись для нужд промышленности.
Действительно, факты показывают, что одни подводные аппараты ржавеют на берегу, другие же хотя и совершают рабочие погружения, но весьма редко. Во всяком случае, используется в среднем только около 15% существующих на сегодняшний день подводных аппаратов, а действующие аппараты нередко поддерживаются в рабочем состоянии только благодаря государственным дотациям.
В чем тут дело?
Все, наверное, помнят, как в 1960 - 1965 гг. США обуяла своего рода "океаническая лихорадка". Бизнесмены вдруг решили, что наука - это та волшебная палочка, прикосновение которой откроет путь к неисчислимым богатствам Мирового океана, и вслед за эрами Атома и Космоса наступит эра Океана. Поэтому американцы со свойственной им смелостью и верой в прогресс приложили максимум усилий, чтобы создать средства проникновения в глубины.

Подводный аппарат 'Алвин', предназначенный для океанологических исследований. Находится в ведении Океанографического института в Вуде-Холе
Началась гонка... Разные фирмы старались как можно быстрее спустить на воду оснащенные по последнему слову техники подводные аппараты. Наиболее крупные фирмы организовывали у себя специальные подразделения и отделы для разработки океанологических проблем, подобно тому как в недавнем прошлом возникали аналогичные структурные научные подразделения, занимающиеся проблемами атома и космоса. Участие в освоении Мирового океана стало вопросом престижа, лучшей рекламой технических и научных возможностей фирмы.
Надо признать, что были достигнуты значительные успехи: впервые появились подводные аппараты, в которых путем разумного компромисса удалось добиться оптимального соотношения между весом необходимого оборудования и водоизмещением, скоростью хода и радиусом действия и т. д.
Казалось, что аппараты эти - верх технического совершенства. Но, к сожалению, сложилось так, что ни для нужд промышленности, ни для научных исследований они по-настоящему использованы не были.
Мы не собираемся оспаривать утверждение, что с 60-х годов для человечества наступила эра Океана. Однако это означало отнюдь не немедленное развертывание эксплуатации ресурсов дна, а лишь начало длинного и трудного пути ко все более полному освоению богатств Мирового океана. И как велико было разочарование, когда в конечном итоге выяснилось, что великолепные подводные аппараты способны всего лишь собрать со дна 20 кг донного грунта, точно так же как это сделал LEM* в космосе, доставивший на Землю 20 кг лунного грунта.
* (LEM - модуль американского космического корабля "Аполлон", доставивший астронавтов на Луну.- Прим. перев.)
С экономической точки зрения это не что иное, как провал. Но остается еще область чисто научных исследований. Каковы достижения здесь? Казалось бы, ученые должны с энтузиазмом встретить появление подводных аппаратов, открывающих новые перспективы перед исследованиями в области биологии, геологии и других наук. Ведь они получали наконец возможность увидеть своими глазами то, о чем раньше могли судить лишь на основании косвенных данных, полученных при изучении тех или иных явлений с поверхности.
Спуск мезоскафа 'Бен Франклин' на воду

Подводный аппарат 'Стар-III'
Некоторые из ученых действительно с большой охотой и знанием дела воспользовались открывшейся возможностью, но таких оказалось немного. Кое-кто, соблазнившись славой, увлекся работами рекламного характера в ущерб научным интересам. Большинство же ученых остановила исключительно высокая стоимость подводного оборудования и подводных работ: ведь не менее интересные и ценные результаты при тех же затратах можно получить с помощью поверхностных исследовательских средств.
Но дело было не только в том, что эксплуатация подводных аппаратов требовала значительных затрат. Здесь сказывался и определенный консерватизм, неумение или нежелание непредвзято, без всякого предубеждения подойти к оценке новых возможностей, открывшихся в исследованиях подводного мира.
Нельзя не учитывать, что до сих пор океанографы всегда вели работы с поверхности, и многие посвятили этому всю свою жизнь. За долгие годы океанографических исследований технические средства и методы изучения океана достигли высокой степени совершенства, благодаря чему была получена обширная информация. Во всех странах программы научных исследований Мирового океана строились, исходя из многолетнего опыта и из имеющихся для этого судов и оборудования. И вдруг появляются куда менее комфортабельные и надежные аппараты, единственное преимущество которых заключается в возможности работать in situ. Да к тому же использование этих аппаратов требует существенного пересмотра организации и методов исследовательской работы, перестройки научных программ.
Вот эти-то обстоятельства и не давали подводным самоходным обитаемым аппаратам в первые годы после их появления стать действенным средством в изучении Мирового океана. Поправить положение не могли ни смелые предложения по использованию подводных кораблей, ни симпатии публики, ожидавшей новых подвигов от "покорителей" океанских глубин. Печать, радио и телевидение не жалели красок, описывая фантастические перспективы, которые ожидают нас в недалеком будущем: Мировой океан столь обширен и столь неизведан, что о нем можно говорить все что угодно - без риска быть обвиненным в шарлатанстве! Однако предпринимателей интересует прежде всего экономическая эффективность любого предприятия, аппараты же стоят слишком дорого... А ученые выжидали, не желая форсировать событий.
И все-таки скептики оказались неправы.
Неизбежные болезни роста - спутники всего нового - в конце концов остались позади.
В процессе создания подводных аппаратов и экспериментов с ними удалось решить многие технические проблемы, приобрести ценный опыт. Отдельные неудачи позволили критически оценить конструкцию и оборудование аппаратов и на основании этого провести работы по их техническому усовершенствованию.
Подводные обитаемые аппараты как средство научных исследований
Посмотрим, как можно использовать подводные обитаемые аппараты при океанологических исследованиях.
Прежде всего следует сказать, что эти аппараты должны применяться в сочетании с другими средствами, которые входят в состав оборудования надводных океанографических судов различного назначения. Обитаемые аппараты не заменяют, а дополняют арсенал средств исследований глубин, позволяя получить специфическую информацию, которую нельзя добыть иным способом.
Обитаемый аппарат позволяет исследователю вести наблюдение in situ
Достоверность научного анализа результатов экспериментов в значительной степени зависит от возможности вести наблюдение за тем или иным явлением или объектом непосредственно в его естественной среде.
Ученые-океанографы ведут свои исследования как на поверхности, так и в глубинах Мирового океана. Но даже если они и получают возможность погрузиться самим в глубины океана, то они могут работать там лишь весьма непродолжительное время. Фото- и киносъемка, телевидение существенно расширили возможности наблюдения за интересующими ученых явлениями или объектами. Однако, несмотря на хорошее качество изображения, получаемая с их помощью информация весьма фрагментарна - она напоминает узкий луч света в беспредельном мраке.
Подводный самоходный обитаемый аппарат мобилен, и поэтому его можно использовать как подвижную лабораторию для проведения наблюдений в нужной точке и на заданной глубине.
Японский океанологический подводный аппарат 'Шинкаи'
'Стар-1'. Красавица и дурнушка
Избирательный отбор проб
Отбор проб при помощи приборов, опускаемых в глубины с надводного корабля, давно стал прозой океанографии. Недостаток этого способа состоит в том, что исследователь не видит, в каких условиях берется проба; беря, например, образцы грунта, он не может видеть, каков в этом месте рельеф дна, и т. д. Следовательно, отбор проб носит в значительной мере случайный характер (что особенно нежелательно при биологических и минералогических исследованиях), и ученый оказывается в роли пассивного наблюдателя.
Исследователь, находящийся на борту подводного обитаемого аппарата, может при помощи манипуляторов собирать образцы для последующего количественного и качественного анализа и одновременно вести визуальное наблюдение. Перемещаясь в водной среде и имея возможность выбирать точки для проведения наблюдений и взятия проб, ученые - члены экипажа обитаемого аппарата становятся таким образом активными участниками эксперимента.
Приборы
Ошибки измерений океанологических характеристик приборами, опускаемыми с надводных судов, в значительной степени определяются большими глубинами, на которых ведутся наблюдения, и неоднородностью водной толщи.
Различные приборы для научных наблюдений могут быть стационарно установлены на обитаемом аппарате или доставлены им в нужное место. В последнем случае приборы устанавливаются на дне и периодически контролируются. При помощи бортовых приборов экипаж аппарата проводит замеры параметров in situ по заданной программе на заданных же глубинах.
Таким образом, подводный обитаемый аппарат по сравнению с надводным океанографическим судном обладает рядом преимуществ, которые позволяют ему вести комплексные исследования, не подвергаясь воздействию гидрометеорологических факторов на поверхности, вдали от взволнованной поверхности, т. е. в относительно спокойных условиях. Эти исследования могут включать избирательное фотографирование и киносъемку объектов, замеры параметров, отборы проб и гидроакустические эксперименты. Все измерения при этом можно производить практически одновременно и целенаправленно.
Посмотрим, каким образом могут быть реализованы эти преимущества при проведении научных исследований в области биологии, физики и геологии Мирового океана.
Биология
Немало есть еще людей, которые полагают, что подводные спуски в обитаемых аппаратах не дают ничего ценного для науки об океане. Чтобы опровергнуть их мнение, приведем некоторые факты.
В 1934 г. У. Биб, погружаясь в своей батисфере на глубину 800 м, прикрепил к ней снаружи омара. Освещаемый прожектором морской рак должен был служить приманкой для обитателей подводного мира, за которыми У. Биб намеревался вести наблюдение через иллюминатор.
Несчастный омар должен был погибнуть под воздействием колоссального давления столба воды высотой в 800 м - его мягкое тело, полагал У. Биб, будет выдавлено из твердого панциря, как зубная паста из тюбика.
Но бравый морской рак вернулся на поверхность не только целым и невредимым, но даже и в великолепной спортивной форме, что доказал сильными ударами своего хвоста! Таким образом выяснилось, что омары, которых добывали на небольших глубинах континентального шельфа, могут спокойно выдерживать весьма значительное гидростатическое давление.
Приведем еще один, не менее убедительный пример - на этот раз из недалекого прошлого.
В 1967 г. небольшой обитаемый аппарат "Алвин" совершал погружение у берегов Флориды. Достигнув дна на глубине 610 м, он потревожил нежившуюся на песчаном грунте меч-рыбу. Не колеблясь ни секунды, обидчивое животное атаковало аппарат. Меч пронзил внешнюю полистироловую оболочку корпуса и застрял в ней, но, к счастью, не повредил проходящий рядом электрический кабель.
Застрявший в корпусе агрессор (длиной 2,45 м!) был поднят "Алвином" на поверхность.
Так стало известно, что меч-рыба может жить гораздо глубже 300-метровой отметки, которая ранее считалась пределом ее обитания, и обладает к тому же весьма скверным характером.
Перейдем, однако, от курьезных случаев к серьезному разговору об использовании подводных обитаемых аппаратов для биологических исследований в глубинах Мирового океана.
С борта обитаемого аппарата с большим успехом, например, можно изучать донные формы морской флоры и фауны.
Конечно, фото- и киноаппаратура, опускаемая с надводного судна, позволяет получить обширную информацию. Но информация эта в значительной мере случайна и отрывочна. А ведь важно вести наблюдение за тем или иным биологическим видом в среде его обитания, во взаимодействии с окружающей его флорой и фауной, на протяжении сравнительно длительного времени и притом не выпуская изучаемый вид из поля зрения исследователя. Вот тут-то и сказываются преимущества подводного обитаемого аппарата: ученый-биолог может сам вести наблюдение через иллюминатор, избирать объекты для изучения, следовать за ними и, таким образом, на месте делать предварительные выводы.
Подводный аппарат 'Си Тэртл', ВМС США
Это чрезвычайно важно - самому вести наблюдение в среде, в которой обитает изучаемый объект! За двадцать пять веков до того, как современная наука на основе достижений оптики и физиологии установила, сколь высока разрешающая способность человеческого глаза, Аристотель писал: "Все люди по природе своей одушевлены страстью к познанию. Удовольствие, которое мы получаем, используя наши органы чувств и прежде всего зрение, является тому доказательством. Действуем ли мы или праздно размышляем, глаз - тот орган чувств, который приносит нам более всего удовлетворения, ибо позволяет постичь суть природы и бесчисленные различия вещей..."
Вот эти преимущества нашего зрения и позволяют ученому, наблюдающему подводный мир из обитаемого аппарата, не только изучать популяции живых организмов в их динамике и статике, но и исследовать их поведение. Надо сказать, что подобный подход к исследованиям издавна свойствен биологии, но до появления подводных обитаемых аппаратов он мог применяться только к животным суши - ведь до тех пор ученые не могли непосредственно наблюдать за поведением морских живых организмов в среде их обитания.
Раньше, например, было неизвестно, в каком положении отдыхают обитатели моря. Наблюдение из подводных аппаратов позволило установить некоторые интересные факты. Оказалось, что некоторые виды рыб отдыхают почти в вертикальном положении, причем одни виды - головой вверх, другие - вниз. В 1955 г. через иллюминатор батискафа удалось заснять на кинопленку бентозавра - так называемую "трехногую" рыбу, спавшую, опираясь на три луча-плавника, точно дремлющий пастух - на посох. Так выяснилось назначение ее двух длинных грудных плавников - предмет многолетних споров ученых.
Не менее интересное наблюдение сделали Кларк и Перси во время погружения в 1968 г. на аппарате "Дипстар-4000". Они установили, что у одного вида изопод - животных, которых до сих пор считали бентосными,- два особых длинных отростка, так называемые "подии", служат не для прикрепления ко дну или передвижения по нему, как думали ранее, а выполняют функцию своего рода крыльев, благодаря которым изоподы легко парят на нужной глубине, точно планеры в небе.
Может быть, подобные наблюдения покажутся читателю несущественными, но это совсем не так. Ведь изучая подводный мир с поверхности, ученые вынуждены воссоздавать поведение его обитателей по отрывочным и неполным сведениям. Наблюдения же с борта обитаемого аппарата позволяют получить объективную и целостную картину. Собираемая ими информация весьма ценна и для практических нужд морского промысла.
Так, находясь на борту обитаемого аппарата "Алюминаут", биологи провели обследование запасов морского гребешка на банках у западного побережья США и установили пути его миграций. Эта информация оказалась весьма полезной для ловцов моллюсков. Во время длительного путешествия другого аппарата - мезоскафа "Бен Франклин" - в водах Гольфстрима его экипаж подробно изучал поведение и пищевой рацион одного из видов крабов (Cancer borealis).
Особенно же удобно использовать обитаемый аппарат для изучения бентосных организмов. Аппарат может опуститься на дно и часами лежать там неподвижно, не возмущая среду и не нарушая покоя обитателей дна, что является неоценимым достоинством при изучении живых существ. Добавим к этому, что современные; средства навигации позволяют с высокой точностью определять место научных наблюдений.
Обитаемый аппарат может и зависать на нужной глубине. Однако в этом случае аппарат должен иметь специальную систему стабилизации, удерживающую его на заданном горизонте. Впрочем, и отсутствие такой системы не помешало ученым-биологам провести исследования вертикального распределения планктона в пелагиали и, в частности, динамики его перемещения. Высокая концентрация планктона в определенных слоях воды - степень концентрации зависит от географической широты и времени года - оказывает влияние на распространение звуковых волн, рассеивая их. Перемещение планктона по вертикали имеет суточную и сезонную ритмичность. Соответственно изменяется и положение ГРС - глубинного рассеивающего слоя. Обитаемые аппараты открывают новые возможности для изучения пространственных и временных характеристик ГРС, о которых еще мало что известно.
Исследования эти имеют весьма важное значение, поскольку для того чтобы подводные и надводные корабли могли осуществлять наблюдение и связь с помощью гидроакустических средств, нужно знать, на какой глубине находится в данный момент ГРС. В свою очередь, преломляющие и рассеивающие свойства ГРС характеризуют состав планктона и его распределение. Таким образом, на основании гидроакустических характеристик могут делать определенные выводы и биологи.
Пересекая при погружении в аппарате различные слои планктона, исследователи периодически берут пробы и производят фотосъемку. Суммируя полученные данные, можно составить стратиграфическую карту ГРС. Сопоставление такой карты с результатами акустических измерений, выполненных с надводного судна, позволяет выявить интересные корреляционные зависимости.
Очень заманчиво использовать обитаемый аппарат для отлова тех или иных океанических видов. Правда, пока что хорошо освоен только лов планктона (для чего применяется описанная нами ранее система: планктон фиксируется на протягиваемой специальным механизмом марлевой ленте).

Глубина 2600 м. Что за животное оставило на дне эти таинственные следы?
Сложнее обстоит дело, если требуется отловить какую-нибудь рыбу, например неизвестного ранее вида, и поднять ее на поверхность. Ведь не так много шансов, что она поведет себя, как меч-рыба, атаковавшая "Алвин".
Особенно сложны отлов и доставка на поверхность глубоководных видов. Чтобы они не погибли при подъеме на поверхность, нужно поместить их в специальную камеру, в которой поддерживалось бы давление, соответствующее давлению воды на горизонте отлова. На вооружении современных аппаратов такой камеры нет, хотя создание ее технически возможно.
Надеюсь, что приведенные примеры достаточно убедительно показывают возможности обитаемых аппаратов в области биологических исследований в подводном мире, а также их преимущества перед надводными судами. Японцы и русские первыми оценили эти преимущества. С 50-х годов на подводных лодках "Куросио" и "Северянка" начались биологические исследования. "Куросио" была построена специально для научных исследований, а "Северянку" переоборудовали в лабораторию из военной подводной лодки. Несмотря на несовершенство установленной на них аппаратуры, первый опыт использования обитаемых подводных аппаратов в научных целях оказался удачным и дал науке много интересных фактов.
С тех пор прошло немало лет. Сейчас появились более совершенные подводные обитаемые аппараты. Благодаря им биологи теперь могут погружаться на большие глубины, чтобы изучать экологию и поведение бентосных и пелагических животных Мирового океана.
Геология
В методике биологических и геологических исследований есть нечто общее - обе науки нуждаются в непосредственном наблюдении изучаемой среды и избирательном отборе проб. Геологи, работающие на дне моря, так же как и на суше, должны иметь возможность рассматривать заинтересовавшие их участки дна, брать пробы грунта и отмечать районы аномалий.
До недавнего времени все эти работы велись только с поверхности - с надводных судов. Геологи были отделены от объекта изучения водной толщей. И все же - мы об этом уже говорили - они сумели получить неплохие результаты.
Возможно, в будущем геологические образцы со дна станут собирать подводным аппаратом именно таким образом
Действительно, каротаж с надводных платформ позволяет отбирать пробы из донных буровых скважин. Драги различных типов дают возможность собирать со дна образцы скальных и осадочных пород. Созданы всевозможные датчики физико-химических параметров грунтов. С помощью современных эхолотов составляются более или менее подробные батиметрические карты Мирового океана, а с помощью гидролокаторов бокового обзора можно проводить своего рода топографическую съемку поверхности дна, получая ясную картину его рельефа. Наконец, сейсмоакустические методы помогли получить представление о геологической структуре пород, лежащих под толщей осадков.
Однако мы все больше убеждаемся, что имеющийся у геологов арсенал технических средств сегодня уже недостаточен.
Может быть, придет день, когда геологи будут получать всю необходимую информацию, проводя исследования с поверхности и анализируя данные, поступающие по телеметрическим каналам. Но это время наступит еще нескоро: те приборы и средства, которыми располагают геологи сегодня, не позволяют ответить на многие вопросы. Поэтому поиски возможностей визуального осмотра дна и взятия проб по-прежнему не теряют для геологов своей актуальности.
Биологи используют обитаемые аппараты, чтобы наблюдать и фотографировать морские организмы в их природной среде, изучать их поведение in situ. Если учесть подвижность объектов изучения и неравномерность их распределения в различных районах, то окажется, что сделать это не так-то просто. Многое здесь зависит от случая.
Геологам в этом отношении легче: во-первых, изучаемая ими среда стабильна (конечно, относительно того диапазона времени, в котором ведутся исследования), и, во-вторых, участок дна, на котором они работают, предварительно уже обследован всеми возможными способами с поверхности. Поэтому геологи могут заранее составить подробные программы исследований, детально наметить все, что необходимо сделать. И в этом их существенное преимущество перед учеными других специальностей.
Не желая утомлять читателя, мы не будем подробно рассказывать о применении обитаемых аппаратов для целей подводной геологии. Приведем лишь некоторые примеры.
С надводного судна взятие проб грунта или сбор лежащих на дне образцов породы проводится вслепую, причем чем больше глубина, тем с большим основанием мы можем это утверждать. Если глубина значительная, мы не можем знать точное положение бура или драги относительно судна, а значит, не можем и определить, с какого именно места дна поднят образец. Ученый же, находящийся на борту подводного обитаемого аппарата, проводит селективный отбор образцов с одновременной фиксацией окружающей обстановки (рельеф дна, характер осадочных отложений и т. д.), что имеет для геолога существенное значение. Все это он проделывает с помощью встроенного в аппарат бура и захватов телеманипулятора.
Заметим также, что при помощи обитаемого аппарата можно производить отбор образцов там, где другими средствами это сделать бы не удалось - например, на вертикальных или крутых склонах подводных каньонов. Кроме того, подводные геологи могут с большей точностью привязывать взятые пробы грунта к местности. А это, в свою очередь, позволяет сопоставить их с данными магнитометрической съемки, которая проводится буксируемой надводным судном аппаратурой.
Мы уже говорили об эффективности сейсмоакустического метода. Однако его результаты в значительной степени зависят от характера и толщины осадочных пород, устилающих дно. Поэтому сейсмоакустическую съемку лучше проводить на участках, где коренные породы выходят на поверхность дна, образуя своеобразные скальные плато. Обычно на поиск таких участков отправляется надводное судно, оснащенное сейсмоакустической аппаратурой.
Но в 1971 г. крохотный подводный аппарат "Пайсиз", экипаж которого вел долгую и упорную разведку нефтяных месторождений в Гудзоновом заливе, блестяще доказал, что эта задача вполне по силам аппаратам подобного типа.
Но как же взять образцы скальных пород? Для этого ведут разведывательное бурение, причем колонковый метод позволяет получить керн. Экипаж "Алвина" при помощи своего бура за десять минут получал керн скального грунта диаметром 2 и длиной 6 см. Конструкторы разрабатывают и более совершенные буры, которые будут извлекать керны 2-метровой длины и, кроме того, измерять температуру породы.
Отбор проб рыхлых осадков, на первый взгляд, представляет меньшую трудность. Однако, проводя бурение с подводного обитаемого аппарата, трудно получить длинные колонки рыхлых пород, не нарушив при этом их структуру. Поэтому приходится либо вести бурение с поверхности (с платформы или специального судна), либо опускать на дно буровую установку, управляемую дистанционно с надводного судна, хотя это и весьма сложно.
Для чего же нужны образцы верхних слоев осадочных пород?
Прежде всего анализ состава и распределения осадков дает возможность сделать заключение об их происхождении, связать образование верхних слоев грунта с процессами переноса породы с суши в прибрежные воды. Ценную информацию можно получить, используя метод мечения радиоактивными изотопами,- это позволяет проследить пути распространения осадков и их характер. Если же мы хотим узнать, как происходило формирование осадочных пород в различные геологические периоды, то нужно бурить породы на глубину по крайней мере 3 - 4 м. Возраст и интенсивность образования осадков устанавливаются с помощью радиоуглеродного анализа органических образований в донном иле.

Глубина 4500 м. Скальная стенка Матапанской впадины
Интересно, что этот метод позволяет изучить и процесс образования пустынь в прибрежных районах. В самом деле, получив пробы осадочных пород со дна устьев пересохших рек, можно установить, как протекал процесс образования пустынь. Такие же пробы грунта в устьях существующих рек показывают, как менялся климат и флора в тех районах, через которые они несут свои воды.
При геологическом исследовании древних пляжей, погрузившихся в глубины океана в четвертичный период, когда чередовались трансгрессии и регрессии, пробы грунта и разведывательное бурение осадочных пород целесообразно производить с борта подводных обитаемых аппаратов, хотя, как мы уже говорили, это и представляет определенную трудность. Таким образом, геологи получают возможность вести поиск подводных россыпей полезных ископаемых на дне континентального шельфа и ложа океана. (Недавно в ВМС США вошел в строй подводный аппарат "Си Клифф", построенный специально для геологической разведки у берегов Калифорнии.)
Экипаж обитаемого аппарата может также производить измерения различных параметров пород - плотности, величины рН и т. д...
Все эти тонкие и сложные операции требуют обязательного присутствия человека in situ. Наблюдатель-ученый отбирает пробы или делает необходимые замеры параметров, выбрав для этого подходящую точку. При этом измерения могут проводиться или с борта аппарата, или при помощи приборов, которые доставляются им на дно и устанавливаются в заданном месте. Через определенный промежуток времени - несколько часов или даже дней - аппарат собирает приборы и поднимает их на поверхность для анализа записанной ими информации. Расставив таким образом на дне сейсмографы, а также океанографическую аппаратуру (измерители скорости течений, приборы, регистрирующие соленость, температуру, химический состав придонных слоев воды), можно получить обширную и интересную информацию.
Наконец, визуальное наблюдение, фотографирование или киносъемка через иллюминаторы обитаемых аппаратов позволяют составить представление о деталях рельефа дна, чего не удается добиться никакими иными средствами. Причем так называемая мозаичная стереофотосъемка (с перекрытием кадров) дает возможность судить о размерах и форме объектов.
В каких же районах Мирового океана целесообразнее всего использовать обитаемые аппараты для геологических исследований? И с какой целью?
И шельф, и ложе Мирового океана в геологическом отношении изучены недостаточно, так что перед подводными геологами открыто практически безграничное поле деятельности. Но первоочередная задача сегодняшнего дня - обнаружение полезных ископаемых в пределах континентального шельфа. Сочетание геологической разведки, ведущейся с борта надводных судов, с подробным обследованием перспективных участков дна, ведущимся с борта обитаемых аппаратов, должно сделать эти поиски более эффективными.
Подводные обитаемые аппараты могли бы заняться научными исследованиями ложа Мирового океана и в первую очередь - еще так мало изученных срединно-океанических хребтов и рассекающих их рифтовых долин. Информация, полученная при непосредственном наблюдении дна в этих зонах, позволила бы лучше понять процессы расширения океанского дна и другие тектонические явления.
На 1973 г. запланировано проведение франко-американской экспедиции, которая займется исследованиями рифтовых долин на глубинах до 3000 м.* В ней примут участие три глубоководных обитаемых аппарата, которые возьмут пробы осадочных и скальных пород и произведут мозаичную фотосъемку на склонах подводных хребтов и в рифтовых долинах, тянущихся в меридиональном направлении. Они также обследуют зону разлома подводных хребтов, проведут магнитометрические и температурные измерения и т. д. Эта экспедиция будет означать начало новой эры глубоководных геологических исследований. Последующие экспедиции, в которых также примут участие обитаемые аппараты, помогут раскрыть немало тайн Мирового океана.
* (В 1973 - 1974 гг. франко-американскаЯ экспедиция "FAMOUS" проводила исследования в рифтовой долине Срединно-Атлантического хребта. К. ле Пишон и К. Риффо, участвовавшие в экспедиции, написали об этих работах книгу. Перевод этой книги готовится к изданию в Гидрометеоиздате.- Прим. перев.)
Большую пользу могли бы принести обитаемые аппараты в исследованиях придонных термальных рассолов в глубоководных впадинах Красного моря, в сборе образцов лежащих под ними осадков - илов, содержащих тяжелые металлы (медь, цинк, свинец, золото, серебро). Не забудем и подводные вулканы: с помощью обитаемых аппаратов геологи смогут изучать их in situ, обогащая науку новыми данными в области геотермии и металлогении.
Обитаемые аппараты незаменимы для исследований подводных каньонов, процесс образования которых еще не совсем ясен. Подводные ущелья уже начали изучаться: батискаф "Архимед" исследовал каньоны в Средиземном море, а "ныряющее блюдце" "SP-350" - каньон Ла-Холья у берегов Калифорнии. Данные о движении потоков, несущих частицы пород (так называемых мутьевых потоков), перемещении осадочных отложений на дне, стратиграфии склонов, полученные во время погружений этих аппаратов, внесли свою лепту в разработку теории образования каньонов.
Не будем останавливаться на использовании обитаемых аппаратов в поисках месторождений конкреций, в сборе образцов грунта и доставке их на поверхность. Эффективность их применения в подобного рода мероприятиях очевидна.
Заметим в заключение, что подводный обитаемый аппарат сможет выполнять свои задачи в геологических и биологических исследованиях только при том условии, что, во-первых, он будет оснащен необходимым оборудованием, и, во-вторых, что его научный персонал подготовлен к подводным работам. Оптимальный вариант - тот случай, когда члены экипажа - инженеры, ученые, пилоты - уже имеют опыт совместной работы, знают привычки друг друга. Как говорят моряки, экипаж должен "сплаваться".
Если все эти условия будут выполнены, обитаемые аппараты внесут существенный вклад в науку.
Физика - геофизика
Геологи и биологи, погружающиеся на борту обитаемых аппаратов, имеют дело с относительно локальными явлениями, происходящими в ограниченных по площади и объему пространствах.
Напротив, физическая океанография изучает процессы, протекающие в океанах и морях, в глобальном масштабе. В ее сферу входят исследования физико-химических свойств и динамики морских вод, взаимодействия океана и атмосферы, характера распространения света и акустических колебаний.
Как экспериментальные данные, так и научные выводы физической океанографии представляют большой интерес для других наук, в особенности для геофизики и геодинамики.
Чем может быть полезен подводный обитаемый аппарат ученым, проводящим исследования в этих областях науки? Вероятно, эффективность его применения будет несколько меньше, польза менее явной, чем в биологических и геологических исследованиях. Однако и здесь не следует пренебрегать подводным обитаемым аппаратом.
Это доказали батискафы "Триест" и "Архимед", экипажам которых удалось получить интересные, хотя и неполные данные о придонных течениях.

Мезоскаф 'Бен Франклин' перед погружением

Подводный аппарат 'Дип Квест' перед погружением
На мезоскафе "Бен Франклин" впервые был осуществлен замечательный эксперимент по изучению Гольфстрима. Целый месяц "Бен Франклин" дрейфовал в водах этого течения в Западной Атлантике. Ученые, находившиеся на борту мезоскафа, впервые смогли познакомиться с Гольфстримом изнутри, исследуя состав, температуру, соленость и другие параметры движущихся масс воды.
Обитаемый аппарат позволяет вести наблюдения за распространением света в водной среде. Меняя глубину погружения, можно получить ценные данные о прохождении звуковых волн на различных горизонтах по данным о температуре и солености воды и наличии взвесей. Мы уже говорили ранее, что весьма важную роль здесь играет ГРС (глубинный рассеивающий слой) и что исследователь, изучающий распространение акустических колебаний, должен одновременно учитывать как физические, так и биологические факторы.
Очень важно, что обитаемый аппарат может брать пробы придонных слоев воды в заданных районах. Это позволяет установить характер циркуляции водных масс в различные геологические периоды путем измерения естественной радиоактивности морской воды. Значение таких измерений становится понятным каждому и в другом аспекте - если вспомнить, что океан слишком часто используется для захоронения радиоактивных отходов...
Измерение гамма-излучения с борта подводных аппаратов дает возможность определить и характер вертикального распределения радиоактивности в водной толще. Как известно, космические частицы поглощаются в поверхностном слое океана, и единственным источником радиации являются растворенные в воде изотопы, в особенности изотопы калия.
С борта подводного аппарата можно также сравнительно легко проводить измерения подводных шумов. Цель таких измерений - установление корреляционных зависимостей между их частотами, глубиной, направлением приема, состоянием моря и концентрацией планктона.
Данные магнитометрических и гравиметрических измерений - мы уже говорили о них ранее - одинаково важны и геологу, и геофизику, и геодинамику. То же можно сказать и об измерениях, характеризующих распространение звуковых колебаний в осадочных отложениях на дне.
Разумеется, геомагнитные измерения проводятся с достаточной точностью и с поверхности - с надводного судна или с самолета. Однако при магнитометрических исследованиях с борта подводного аппарата легче выявить и учесть влияние местных аномалий.
Гравиметрические измерения с борта подводных аппаратов имеют уже давнюю историю - впервые они проводились в 1923 г. на подводных лодках военно-морского флота. Следует учесть, что гравиметрические измерения во избежание значительных погрешностей нужно проводить на больших подводных аппаратах. Так, хорошие результаты измерений гравиметрических полей получены с борта "Алюминаута", мезоскафов "Бен Франклин" и "Огюст Пиккар". Малые обитаемые аппараты для этой цели не годятся: как гравиметрические платформы они недостаточно устойчивы и испытывают слишком большие ускорения при возмущениях водной среды или изменениях весовой нагрузки.
Подводные аппараты подо льдом
Итак, мы рассказали вкратце о преимуществах подводных обитаемых аппаратов перед надводными судами в области исследований океанских глубин на примере тех случаев, когда наблюдения или работы требуется проводить непосредственно на дне.
Но мы не коснулись еще одной области применения подводных обитаемых аппаратов, в которой они, будучи единственным средством проникновения в подводный мир, совершенно незаменимы. Речь идет об обширных арктических районах, экономическое значение которых растет с каждым годом,- о Северном Ледовитом океане и полярных морях, еще недостаточно изученных и ждущих своих исследователей.
Геологи уже давно предполагали, что под дном морей Северного Ледовитого океана, в недрах лежащих за полярным кругом островов таятся колоссальные запасы полезных ископаемых, в особенности нефти. Некоторые ученые даже высказывали мнение, что потенциальные запасы нефти и газа в Арктике больше, чем в районе Персидского залива, или, по крайней мере, сравнимы с ними.
Эти предсказания принимались, как правило, весьма скептически. Но недавние открытия геологов на шельфе арктических районов Аляски подтвердили самые смелые предположения - и то, что было гипотезой, стало фактом. Быстрое развитие нефтяной и газовой промышленности возродило давно забытые городки и поселки Аляски, известные нам по эпохе клондайкской золотой лихорадки, так красочно описанной Джеком Лондоном.
Появились и новые города, тысячи людей съехались со всех концов света, чтобы работать на предприятиях известных нефтяных компаний "Эссо", "Мобил ойл", "Тотал", "Шелл"...
Но прежде чем приступить к промышленному освоению минеральных ресурсов полярных морей, нужно провести геологическую разведку, тщательно подготовиться к строительным работам, решить проблемы транспортировки промышленного оборудования, а затем и добываемых полезных ископаемых.
Конечно, осваивать месторождения полезных ископаемых, лежащих на дне скованных льдами полярных морей, можно и с поверхности, но такая работа потребует фантастических усилий.
И поэтому совершенно понятны надежды, которые возлагают нефтяные компании на подводные обитаемые аппараты. Разумеется, такие аппараты должны не только обладать совершенными навигационными средствами и большой автономностью, но и иметь приборы для ведения геологической разведки и другое научно-исследовательское оборудование в зависимости от своего назначения. В первую очередь их предполагают применять именно для геологической разведки, а в дальнейшем и для периодического контроля установленного на дне оборудования нефтяных и газовых промыслов. Предвосхищая будущее, мы можем предсказать и появление подводных танкеров для транспортировки нефти и газа.
В условиях Арктики транспортировка нефти и газа представляет особую сложность. С началом их добычи на Аляске возник целый ряд проблем. Были предложены три варианта доставки нефти и газа в США и Канаду.
Первый вариант - использование надводных судов. В 1968 г. пресса шумно рекламировала успешный переход крупнотоннажного танкера ледокольного типа "Манхэттен" от северных берегов Аляски в Атлантику Северо-Западным проходом. Но даже этот танкер с усиленным корпусом (судно перестроено из линкора времен второй мировой войны) получил несколько пробоин и только с большим трудом преодолел льды. Так что вряд ли этот вариант можно считать перспективным.
Второй вариант - прокладка нефтяных и газовых трубопроводов, способ классический, но не такой простой, как это кажется на первый взгляд. Ведь через арктическую тундру нужно проложить трубопровод длиной, по крайней мере, в 1500 км. Американцы уже провели эксперимент по укладке трубы диаметром 1,2 м и длиной 2 км. Одна нить была уложена в вырытую в земле траншею, вторая - на опоры, поднятые над землей.
Прокладка трубопроводов в арктических районах - технически вполне разрешимая задача. Но строительство протянувшихся на тысячи километров трубопроводов потребует колоссальных средств. Немало трудностей возникнет и с их эксплуатацией. Придется, например, подогревать нефть примерно до 60°С, а появление нового, протянувшегося на сотни километров источника тепла может привести к нарушению экологического равновесия окружающей среды. Как известно, общественность США очень чувствительна к проблемам подобного рода.
Все сказанное выше заставляет задуматься и над третьим вариантом транспортировки - над использованием подводных танкеров. Безусловно, это должны быть большие суда с атомным двигателем. Первый проект такого гигантского судна водоизмещением 200 000 т уже создан фирмой "Дженерал дайнэмикс". Преимущества подводного танкера перед надводным в Арктике очевидны: ему не надо пробиваться сквозь льды - он проходит под ними. Поэтому конструкция корпуса и мощность двигателя атомного танкера, созданного для плавания в арктических морях, существенно не отличаются от подводных кораблей, предназначенных для плавания в прочих районах Мирового океана.
По проекту танки для нефти или для сжиженного газа размещаются в легком корпусе атомохода; предусмотрены и специальные системы для перекачки нефти из подводных хранилищ на танкер в подводном положении, что должно упростить грузовые операции.
В целях обеспечения безопасности плавания подводные гиганты следует оснастить современными электронавигационными средствами, в первую очередь инерциальными системами и гидроакустическими комплексами. По трассам же подводных маршрутов было бы целесообразно поставить цепь подводных гидроакустических маяков, что также повысит навигационную безопасность.
Проект подводного танкера-гиганта создан. Но еще не решены технические вопросы, связанные с его строительством. Не так просто перейти от подводных лодок водоизмещением в несколько тысяч тонн, предназначенных для боевых действий, к грузовым подводным судам водоизмещением в сотни тысяч тонн. Нужно усовершенствовать системы погружения и всплытия - ведь груз танкера имеет меньший удельный вес, чем вода; нужно убедиться в том, что гигант будет обладать должной остойчивостью; придется подумать и над тем, как в случае необходимости погасить его инерцию...
В реализации этих проектов нет ничего фантастического. Подводные танкеры - отнюдь не химера. Ведь всего десятилетие прошло с тех пор, как с Земли стартовали ракеты весом в несколько тонн, а сейчас в космос уходят корабли "Сатурн-V" весом 2900 т. Можно надеяться, что и инженеры-кораблестроители не менее успешно решат стоящие перед ними задачи.
Вторжение в подводный мир
Здесь мы вступаем в область, гораздо лучше известную широкой публике, поэтому вопросы, которых мы коснемся, не потребуют подробных объяснений.
Сегодня подводным обитаемым аппаратам доступны любые глубины. Конечно, как и у всякого технического средства, их возможности (например, по автономности и скорости) ограничены определенными пределами. Но практически их экипажи, используя телеманипуляторы с захватами и различные приборы, могут проводить широкий круг исследований и выполнять некоторые производственные задания. Приведем несколько примеров.
Батискаф "Триест" нашел потерпевшую аварию американскую атомную подводную лодку "Трешер". Через иллюминаторы батискафа были сфотографированы обломки атомохода, а отдельные узлы оборудования и части корпуса даже удалось поднять на поверхность.
Благодаря совместным действиям подводных обитаемых аппаратов "Алвин" и "Алюминаут", а также дистанционно управляемого подъемного устройства "CURV-I" удалось найти и поднять водородную бомбу со дна Средиземного моря, упавшую с самолета близ Паломареса (Испания).
В 1968 г. один из новейших тогда обитаемых аппаратов "Дип Квест", погрузившись на дно, случайно намотал на винт трос и не мог всплыть. Маленький "Нектон", простейший по устройству, но очень маневренный подводный аппарат, освободил своего большого собрата, перерезав трос перочинным ножом, закрепленным в захвате манипулятора. Забавная иллюстрация лафонтеновской басни о Льве и Мышонке на 180-метровой глубине!
В том же 1968 г. случилось несчастье с "Алвином": при подъеме аппарата на борт обеспечивающего судна он зачерпнул воду через открытый после выхода экипажа люк и затонул на глубине 2300 м. В те годы было немного аппаратов, способных провести спасательные работы на такой большой глубине. Выбор пал на "Алюминаут". Операция предстояла трудная. Дело осложнялось тем, что у северо-восточного побережья США, где затонул "Алвин", часто штормит и море редко бывает спокойным.
Итак, предстояло отыскать на дне затонувший аппарат, каким-то образом зацепиться за него тросом, потом доставить ходовой конец этого троса на поверхность, на спасательное судно. Но как зацепить трос? Решили, что если "Алвин" еще не покрыт донным илом и люк у него остался открытым, то следует попытаться завести в люк специально сконструированный стальной стержень с распоркой. Когда надводное судно-спасатель начнет выбирать трос лебедкой, распорка должна заклиниться в шахте.
Боги моря были великодушны к "Алвину": люк оказался открытым и сам аппарат лежал в таком положении, что можно было попытаться завести стержень в люк. Но вначале экипажу "Алюминаута" пришлось размотать нейлоновый трос и разложить его по дну, чтобы иметь для маневров слабину. Потом, удерживая в захвате манипулятора стержень, "Алюминаут" начал подходить к открытому люку "Алвина". Завести в него стержень с прикрепленным к нему тросом было наверняка не легче, чем в темноте вдеть нитку в иголку, имея на руках железные перчатки!
После нескольких неудачных попыток и многих часов утомительной работы упорство экипажа было вознаграждено: стержень с распоркой завели в люк, где она и заклинилась. Вскоре "Алюминаут" доставил на поверхность трос, и начался подъем затонувшего аппарата.
"Алвин" пролежал на дне океана почти год. Однако, к общему удивлению, его металлические части не подверглись коррозии. Не пострадали даже бутерброды, которые экипаж оставил в аппарате. Они, конечно, намокли, но остались пригодными для употребления в пищу. Этот факт свидетельствует об очень низкой микробиологической активности на больших глубинах, о чем ранее не было известно. Вот еще одна перспективная область для исследовательской работы...
В заключение расскажем о другой необычной глубоководной операции с использованием обитаемых аппаратов - о спасении "ныряющего блюдца" "SP-3000".
Летом 1971 г., после окончания различных доработок, "SP-3000" был доставлен на обеспечивающем судне в район Неаполя, где он должен был пройти глубоководные испытания. Первое погружение проводилось без экипажа. Аппарат решили опустить на глубину 3300 м на нейлоновом тросе, заведенном на мощную лебедку.
Во время спуска - видимо, в результате вибрации и рывков аппарата - вывинтился болт из соединительной скобы, при помощи которой трос крепился к рыму прочного корпуса "SP-3000". Не связанное более с обеспечивающим судном, "блюдце" стало быстро погружаться, увлекаемое ко дну 500-килограммовым балластом.
В 15 м от дна аппарат как бы стал на якорь - якорем послужил балласт, прикрепленный к прочному корпусу тросом диаметром 20 мм. Этот "якорь" удерживал герметичное и обладающее положительной плавучестью "блюдце" у дна. Его местоположение все время оставалось известным благодаря бортовому акустическому излучателю - так называемому пинджеру (запас энергии позволял ему работать в течение месяца).
Уже через неделю к месту аварии доставили батискаф "Архимед", и он опустился на дно в 1500 м от "блюдца". Пеленгуя сигналы пинджера, "Архимед" пошел на сближение с аппаратом и на расстоянии 500 м обнаружил "утопленника" своим гидролокатором. Прошло еще полчаса, и в поле зрения наблюдателей "Архимеда" показался трос, соединяющий балласт с "блюдцем". Умело маневрируя, батискаф подошел ближе, захватил телеманипулятором трос, и дисковый вращающийся нож, закрепленный в захвате манипулятора, перерезал нейлоновый трос. "SP-3000" взмыл на поверхность. Так впервые в мире с глубины 3300 м был поднят затонувший аппарат.
Мы могли бы привести еще немало примеров успешного использования обитаемых аппаратов. Но и сказанного достаточно, чтобы убедить читателя в способности таких аппаратов заниматься самыми различными работами под водой, если на вооружении у них будут надежные средства навигации, эффективные телеманипуляторы и средства обнаружения подводных объектов на достаточно большом расстоянии. При этом желательно, чтобы аппараты были не слишком сложны по конструкции и просты в эксплуатации. Но они вовсе не должны "уметь" делать все что угодно.
Универсальность таких аппаратов не что иное, как миф, во имя которого появляется слишком много дорогостоящего оборудования, которое потом никто не знает, где и как применить. Применять такие аппараты при промышленной эксплуатации ресурсов Мирового океана - все равно, что использовать "роллс-ройсы" на сельскохозяйственных работах.
Эпоха, когда фирмы из престижных соображений соревновались в создании подводных аппаратов, вооруженных как можно большим набором сложных технических средств, уже миновала.
Сейчас уже не конструируют подводных аппаратов общего назначения - "для освоения океана", как говорили в свое время. И здравый смысл, и практический опыт позволили прийти к выводу, что нужно строить специализированные аппараты: во-первых, это даст большой экономический эффект, а во-вторых, расширит возможности их использования для работ и исследований в океанских глубинах.
Например, для обследования проложенных по дну трубопроводов пока что нужны обитаемые аппараты с глубиной погружения до 300 м, несложные в эксплуатации, но имеющие большой радиус действий. Возможно, что они не будут иметь автономного источника энергии, а станут получать ее по кабелю с поверхности; ведь таким аппаратам не нужно обладать особой маневренностью и подвижностью, поскольку они перемещаются в основном по прямой. Вероятно, им не понадобится и телеманипулятор - цель экипажа не ремонт трубопровода, а наблюдение за ним.
Зато для прокладки в донном грунте траншей для подводных кабелей и трубопроводов нужны уже обитаемые аппараты с совершенно другими техническими данными: они должны передвигаться по грунту на гусеницах, получая энергию с поверхности по кабелю, должны иметь необходимые орудия для работы.
Развитие подводных нефтепромыслов стимулирует широкое распространение средств для транспортировки обслуживающего персонала с поверхности к устьям скважин и другому оборудованию, установленному на дне. От них не требуется большой автономности или большого радиуса действия, но зато они должны быть удобными. Аппараты эти оснастят специальными устройствами для стыковки с подводными домами, телеманипуляторами, приспособленными для различных работ с гидравлическими и электрическими инструментами, а также захватами для управления вентилями на трубопроводах.
Подводя итог сказанному, следует отметить, что, прежде чем приступать к проектированию подводного обитаемого аппарата, нужно четко себе представлять, для решения каких производственных или научных задач он предназначается.
Некоторые технические проблемы
Как выбрать тип подводного аппарата?
Поговорим о том, как выбрать тип подводного аппарата.
Скажем сразу, что сделать это труднее, чем выбрать автомобиль, самолет или бульдозер. Прежде чем заказать подводный аппарат, нужно точно знать, для чего он предназначен.
Заказчик может вести себя по-разному. Вариант первый - заказчик полностью доверяет конструктору. Увы, в этом случае есть все шансы получить проект универсального подводного аппарата, предназначенного для фото- и киносъемок, научных исследований и подводных работ, проведения спасательных операций и транспортировки водолазов.
Вариант второй - заказчик имеет свои идеи и продумал конкретное назначение аппарата. Это оптимальный вариант при условии, что все задачи и цели определены точно.
Но в любом случае нужно помнить, что идеального подводного аппарата не существует. И таковой не появится и в будущем. Строя любой подводный аппарат, всегда придется путем разумного компромисса добиваться оптимального соотношения между его водоизмещением, весом и габаритами необходимого оборудования, рабочей глубиной погружения, скоростью и автономностью...
Водоизмещение
Разрабатывая технический проект подводного обитаемого аппарата, мы неизбежно встаем перед дилеммой: должен ли он выходить из порта и возвращаться в него самостоятельно (как подводные лодки военно-морских сил), плавать на поверхности и под водой, обходясь без средств обеспечения,- т.е. должен ли он быть действительно автономным или же следует ограничиться погружениями поблизости от обеспечивающего судна-базы? Прежде чем сделать выбор, нужно подумать о возможном водоизмещении, запасе энергии и, не в последнюю очередь, о финансовой стороне.
Об океанологической подводной лодке большого водоизмещения уже давно мечтают все, кто хочет проникнуть в тайны подводного мира. Создание такого корабля не представляет особых трудностей. Можно просто переоборудовать военную подводную лодку: установить дополнительные движители для перемещения в вертикальной и горизонтальной плоскостях (чтобы сделать ее более маневренной), обеспечить возможность визуального наблюдения под водой, смонтировать телеманипуляторы. Такой корабль сможет служить и науке, и промышленности. Эта идея нашла свое воплощение в США: в состав военно-морских сил страны входит атомная подводная лодка "NR-1". Ее технические данные и назначение являются военной тайной.
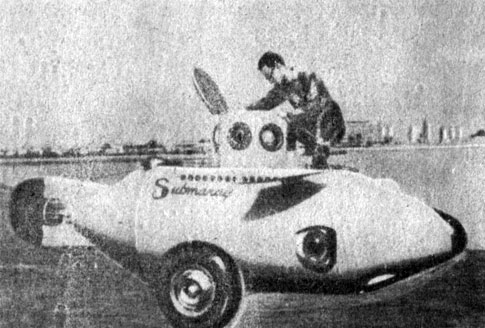
'Сабмарэй' - в 'две лошадиных силы'
Автономный подводный обитаемый аппарат должен иметь водоизмещение не менее 500 т. Но длительное пребывание под водой и мобильность корабля может обеспечить только мощный источник энергии. А таким источником может быть только атомная энергетическая установка. Разумеется, водоизмещение подводного атомохода значительно превышает приведенный нами минимальный предел. Такой подводный аппарат далеко не всем по карману...
И все же, по-видимому, научно-исследовательские подводные атомоходы появятся в некоторых развитых странах, проявляющих постоянный интерес к освоению Мирового океана, еще до 1985 г.
В составе их экипажей будут находиться квалифицированные океанологи. Заметим, кстати, что сформировать работоспособный научный коллектив значительно сложнее, чем экипаж подводной лодки военного назначения.
Но вернемся к реальному положению дел. Примеру США не последовала ни одна страна, и вряд ли в ближайшие годы появятся большие океанологические подводные лодки. Конечно, читатель может спросить: не лучше ли строить поменьше подводных ракетоносцев и побольше подводных обитаемых аппаратов, предназначенных для нужд науки и промышленности? Как ответить на такой вопрос? Это старый, как мир, спор о том, что важнее - пушки или масло...
Итак, если нет возможности использовать большие подводные океанологические корабли, придется остановить свой выбор на подводных аппаратах, требующих обеспечения надводных судов. Такое надводное судно-база доставляет подводный аппарат в заданный район на своей палубе (как транспортируют аппараты весом до 20 т) или ведет его на буксире (как, например, буксируют "Алюминаут" и "Бен Франклин").
Надводное обеспечение
При проектировании обитаемого подводного аппарата, предназначенного для научных исследований и выполнения заданий для нужд промышленности, надо непременно исходить из того, что он является лишь частью сложного комплекса. В этот комплекс входят надводное обеспечивающее судно, средства связи и навигации, системы обеспечения безопасности. Все части комплекса взаимосвязаны, одна часть зависит от другой. Поэтому если спроектировать и построить обитаемый аппарат, не продумав весь комплекс в целом, в дальнейшем придется в спешке подыскивать подходящее надводное судно и ломать голову над тем, как переоборудовать его в судно-базу.
К сожалению, в большинстве случаев именно так и поступали.
Путь, скажем прямо, не лучший. Ведь для того чтобы подводный аппарат и судно-база представляли собой надежный и эффективный тандем, должно быть обеспечено их слаженное взаимодействие как во время работы, так и во время перехода морем в надводном положении в любую погоду, а также при спуске аппарата на воду и подъеме его на палубу. Не исключена вероятность того, что, ударившись на волне о борт обеспечивающего судна, пострадает корпус подводного аппарата и что все та же волна смоет в штормовую погоду подводников, пытающихся открыть люк и выйти на палубу. Значит, тандем "судно-база - подводный аппарат" должен обеспечивать стыковку при сильном волнении и последующий переход экипажа непосредственно из люка аппарата в шлюзовую камеру судна.
Судно-база, которое транспортирует обитаемый аппарат весом до 20 т на своей палубе, не может обеспечить должной степени безопасности ни экипажу, ни самому аппарату. Правда, для подъема аппарата на борт такие суда имеют мощные краны с гидравлическими захватами, которые не дают аппарату раскачиваться. Существенный шаг вперед достигнут в результате использования в качестве обеспечивающих судов катамаранов, обладающих значительными преимуществами перед обычными судами-базами.
Как правило, каждый подводный аппарат имеет свое судно обеспечения. Так, "Алвин" (водоизмещение 30 т) совершает погружения с борта катамарана "Лулу", что, впрочем, как вы помните, не помешало ему уйти на дно, а "Дип Квест" (водоизмещение 50 т) работает, так сказать, в паре с катамараном "Транс Квест" (водоизмещение 450 т), корпус которого в плане напоминает подкову. Всплыв на поверхность после погружения, аппарат заходит в пространство между корпусами катамарана и оказывается на притопленной на 3 м платформе подъемного устройства. После ее подъема аппарат жестко крепится к корпусу катамарана.
Надо полагать, что в дальнейшем в качестве обеспечивающих судов в основном будут использовать катамараны. В ВМС США в настоящее время проходит испытания катамаран большого водоизмещения.
Существуют и другие проекты обеспечивающих судов. Так, система для спуска и подъема аппарата может быть сконструирована в виде наклонной плоскости - аппарели, которая является продолжением палубы, опускающейся в воду. В этом случае аппарат подтягивается на предназначенное для него место либо спускается на воду при помощи гидравлического крана или на специальной тележке, движущейся по проложенным по аппарели рельсам.
В дальнейшем, когда обитаемые аппараты все шире будут применяться для подводных работ, безусловно, появятся какие-то другие модификации обеспечивающих судов. Среди них, вероятно, будут и самоходные полупогружающиеся платформы, и полупогружающиеся суда.
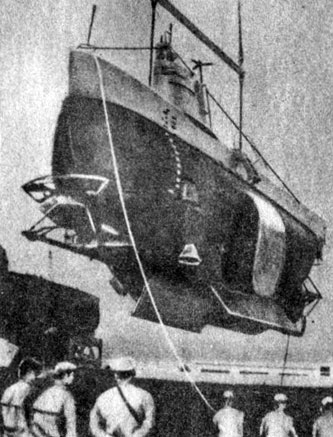
Спуск 'ныряющего блюдца' 'SP-350' на воду
Определение характеристик океанологического подводного аппарата
При проектировании подводного обитаемого аппарата инженер всегда ограничен некоторыми рамками, которые обусловлены рядом взаимосвязанных условий. Как правило, условия эти даются проектанту заказчиком в форме технического задания.
Вот основные из них:
- численность экипажа (в том числе пассажиров);
- максимальная глубина погружения;
- степень автономности;
- скорость;
- вес и габариты необходимого оборудования;
- характер работы, которую аппарат должен выполнять на дне;
- способ доставки аппарата к месту погружения и исходя из этого требования, предъявляемые к обеспечивающему судну и собственно к аппарату.
Начинать проектирование нужно с попытки найти компромисс между противоречащими друг другу требованиями технического задания, чтобы определить в общих чертах, каким должен быть аппарат.
Это очень важно, ибо диапазон характеризующих аппарат данных чрезвычайно велик: ведь он может погружаться на 300 или на 4000 м, плавать на большие расстояния или действовать на ограниченном участке дна, брать на борт двух человек или шесть, давать возможность всего лишь вести наблюдение через иллюминатор или еще и проводить разнообразные работы при помощи телеманипуляторов, транспортироваться на самолете или буксироваться обеспечивающим судном. От конкретных технических требований и будет зависеть решение конструктора - руководителя проекта.
После того как такое предварительное решение принято, начинается проработка конструкции главных узлов аппарата: прочного корпуса, легкого корпуса, энергетической установки, движителей и оборудования.
Прочный корпус
Форма и толщина листов обшивки прочного корпуса выбираются в зависимости от используемых материалов и рабочей глубины погружения, а также конструкции аппарата в целом. Габариты прочного корпуса определяют исходя из оборудования, которое в нем нужно разместить. После того как параметры, характеризующие прочность корпуса, установлены, они умножаются на коэффициент запаса прочности, чтобы компенсировать возможное снижение прочностных характеристик из-за неоднородности структуры применяемых материалов, коррозии, ошибок в конструкторских расчетах. Обычно для больших глубин коэффициент берется равным 1,5, а для малых - 2 или 3.
Прочный корпус должен успешно противостоять двум эффектам колоссального гидростатического давления - деформациям на изгиб и избыточным напряжениям, вызываемым сжатием материала корпуса. Желательно, чтобы величины критического давления для обоих эффектов соответствовали друг другу. Если этого нельзя добиться, проблему приходится решать по-иному. Например, можно сделать стальную обшивку корпуса, но зато усилить его набор ребрами жесткости по линиям максимальных напряжений.
Исходя из требований обеспечения максимальной прочности, выбирается и форма прочного корпуса. Прочный корпус может быть сферическим, эллипсоидальным, цилиндрическим, а может состоять и из нескольких сфер, соединенных цилиндрическими переходами. Листы обшивки прочного корпуса "сшивают" при помощи электросварки, надежность которой уже неоднократно проверена при глубоководных погружениях.
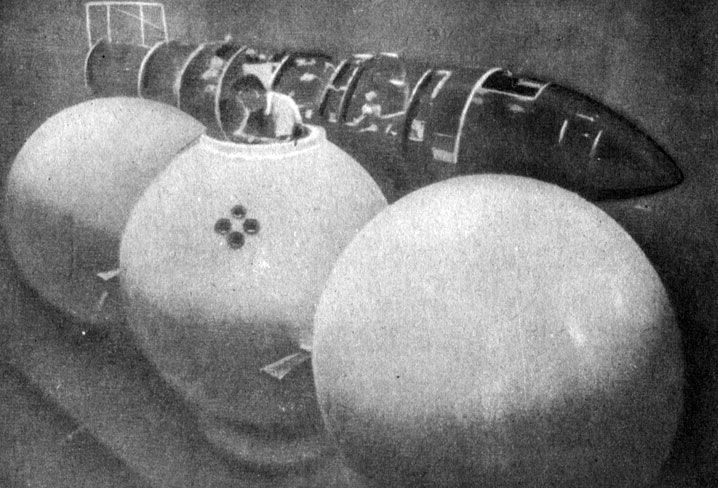
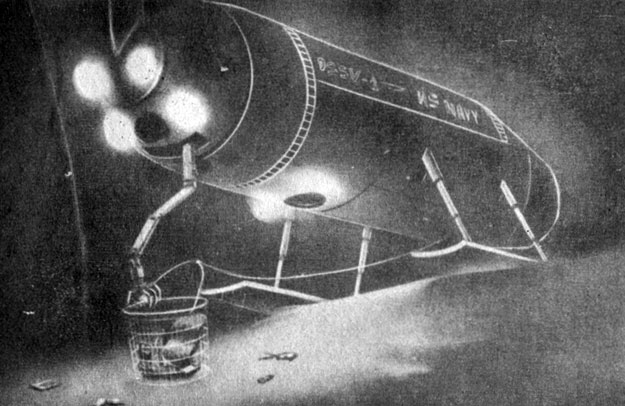
Три сферы, составляющие прочный корпус 'DSRV'
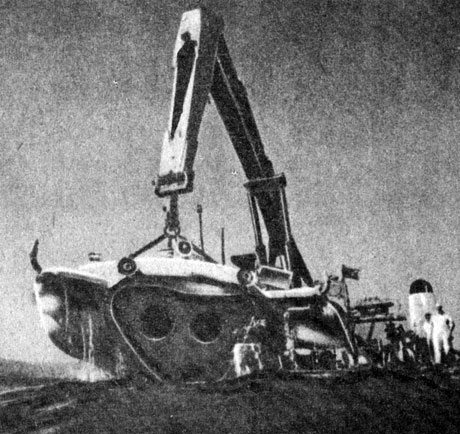
'Чрево' 'Дип Квеста'
Сфера диаметром до 2,5 м, несмотря на производственные трудности ее изготовления,- наилучшее конструктивное решение прочного корпуса для обитаемого аппарата: именно сфера обеспечивает оптимальное соотношение веса и объема. При расчете конструкции прочного корпуса добиваются того, чтобы это отношение было как можно меньшим, поскольку именно это обеспечивает аппарату сохранение положительной плавучести.
Чем больше рабочая глубина погружения подводного аппарата, тем толще должна быть обшивка прочного корпуса. Если в результате увеличения веса аппарат получает отрицательную плавучесть, приходится использовать наполнитель с меньшим, чем у воды, удельным весом - например, различные синтетические материалы. Можно считать, что 1 кг материала малой плотности (0,5) компенсирует 0,5 кг отрицательной плавучести. Однако при этом растет объем аппарата и его вес вне воды. В итоге приходится увеличивать мощность двигателей, а это значит, что растет вес аккумуляторных батарей - источника энергии. Поистине цепная реакция!
Отсюда напрашивается вывод: для подводного аппарата нужны новые конструкционные материалы - металлы либо неметаллы, которые были бы легче стали, но не уступали бы ей в прочности, а главное - были бы пригодны для изготовления крупных деталей корпуса аппарата. Кроме того, эти материалы должны быть не очень дорогими.
Остановимся вкратце на физико-механических свойствах некоторых конструкционных материалов.
Прежде всего, широко применяются различные марки высокопрочной и сверхпрочной стали с пределом текучести от 70 до 175 кг/мм2 - "васкоджет-90" (80 кг/мм2), "мар эджинг" (100 и 140 кг/мм2).
Для прочного корпуса "Алюминаута" были использованы алюминиевые сплавы. Корпус этого аппарата цилиндрический, а корма и нос заканчиваются полусферами. По проекту "Алюминаут" может погружаться на глубину 4000 м, однако за все время эксплуатации он не опускался больше чем на 2500 м.
Преимущество алюминиевых сплавов - небольшая плотность (2,7 г/см3) и возможность эффективной антикоррозионной защиты (так называемой анодной защиты).
Но наиболее перспективным материалом для глубоководных аппаратов сейчас принято считать титан, который при достаточно малой плотности (4,5 г/см3) обладает высокой коррозионной стойкостью*, большим сопротивлением на разрыв и высоким пределом текучести. Существуют различные сплавы титана с алюминием, оловом, ванадием, молибденом и хромом, из которых можно отливать нужные детали, прокатывать листы для обшивки корпуса. Сварка листов из титана и его сплавов уже хорошо освоена. Широкое применение титана сдерживается некоторыми техническими трудностями, особенно при строительстве кораблей большого водоизмещения. И все же для корпуса модернизируемого "Алвина" будут использованы титановые сплавы.
* (Корродирование титана в условиях больших давлений изучено еще недостаточно.- Прим. авт.)
Наряду с апробированными сплавами металлов начали появляться материалы неметаллические - гомогенные или композитные. Но пока все они проходят испытания и широкого применения еще не получили.
Как ни удивительно, один из этих материалов - стекло. Оно обладает существенными преимуществами перед другими материалами, из которых делают корпуса глубоководных аппаратов. Плотность его мала (2,5 - 4 г/см3), а сопротивление сжатию велико. Немалое значение имеет и прозрачность этого материала. К сожалению, стекло, обладает не столь высокой, как хотелось бы, ударной вязкостью и при значительной жесткости имеет недостаточную прочность на изгиб (правда, сопротивление на изгиб можно увеличить закалкой). Изготовить из стекла конструкционный материал - дело сложное.
'Костяк' 'ныряющего блюдца' 'SP-3000'
Возможности применения стекла для строительства подводных аппаратов всесторонне изучались в США фирмой "Корнинг гласс". Экспериментальная сфера подводного аппарата из акрилового пластика, рассчитанная на двух человек, уже испытывается ВМС США. Она предназначена для погружений на глубину 200 м. Аппарат построен фирмой Линка (проект Перри). Считается, что великолепные возможности для визуального наблюдения дают этому подводному обитаемому аппарату существенные преимущества перед конструкциями из непрозрачных материалов. Но его применение сильно осложняется тем, что, хотя акриловый корпус и защищен металлическим каркасом, обращаться с ним при эксплуатации приходится крайне осторожно.
Материал с высокими прочностными характеристиками создан фирмой "Доу кэмикл" - это стекло марки "пирокерам-9606", способное выдерживать двухосные напряжения на сжатие более 250 кг/мм2.
Определенные перспективы для подводного судостроения открывают также слоистые пластики, которые уже нашли применение для производства кузовов автомобилей, и композитные составы, например стеклоалюминий.
Представляют интерес для конструкторов и материалы типа "сэндвич": пластик - металл и металл - металл. Они обладают более высокой прочностью на изгиб, чем однородные материалы такого же веса, что достигается за счет прокладки ячеистой структуры, хорошо сопротивляющейся сжатию, между металлическими (пластиковыми) оболочками.
Для подводных конструкций выгодно применять предварительно напряженный железобетон. Это материал недорогой, и строительные фирмы уже хорошо освоили его производство и применение. Высокопрочный бетон не подвержен коррозии и потому широко используется при строительстве подводных платформ. В прибрежных водах Калифорнии проходит испытания подводная обитаемая лаборатория, построенная из железобетона.
Не появится ли в один прекрасный день и железобетонная подводная лодка?
В Швеции появился проект такого подводного аппарата. Его общий вес - при условии, что аппарат станет применяться на относительно малых глубинах - по-видимому, будет находиться в тех же пределах, что и вес аппарата, сделанного из металла.
Прочный корпус подводного аппарата является его сердцевиной. В нем размещаются экипаж и средства навигации. Все остальное - двигатели, генераторы и аккумуляторная батарея, запасы сжатого воздуха и ртутная дифферентная система, балласт и бункеры для образцов - согласно проекту находится в легком корпусе, так же как и твердый наполнитель (стеклянные шарики диаметром от 20 до 130 мкм, залитые эпоксидной смолой), обеспечивающий положительную плавучесть.
Источники энергии
Скорость и радиус действия подводного аппарата, способность выполнять те или иные виды работ зависят от мощности его энергетической установки. Для визуального наблюдения освещаемого прожектором участка дна целесообразно иметь скорость не более 3 узлов, иначе объекты будут находиться в поле зрения наблюдателя слишком короткое время. Кроме того, большая скорость не нужна и из соображений безопасности: идя вблизи дна, аппарат может столкнуться со скалой или каким-либо иным подводным препятствием.
Аппарат должен быть рассчитан на плавание в подводном положении по меньшей мере в течение двух часов. Малые подводные аппараты, в которых нет условий для отдыха экипажа, погружаются максимум на восемью - десять часов - таков предел их автономности.
Энергетическая установка аппарата должна обеспечивать также работу телеманипулятора и производственного оборудования, которым он снабжен (различные инструменты для подводных работ, буры и пр.). Для работы под водой в течение двух - десяти часов нужно иметь запас энергии приблизительно от 30 до 100 кВт.ч. При проектировании подводного аппарата конструктор избирает тип энергетической установки исходя из веса, габаритов, мощности, надежности и стоимости.
Как правило, в качестве источника энергии используются аккумуляторные батареи. Их размещают или внутри прочного корпуса (как на подводных лодках и на "Алюминауте"), или выносят за его пределы, чтобы исключить опасность взрыва выделяемого аккумуляторами водорода. В последнем случае аккумуляторы помещают в заполненный маслом контейнер, который защищает их от гидростатического давления и предохраняет электролит от контакта с морской водой. Для стравливания газов на контейнере устанавливается предохранительный клапан.
Большинство подводных аппаратов имеет свинцово-кислотные аккумуляторы, иногда даже такого же типа, как на обычных автомашинах. Их удельная энергия, т. е. отношение запаса энергии к массе источника, мала: она составляет всего 25 - 30 Вт.ч/кг, зато такие аккумуляторы дешевы, удобны в эксплуатации и легко перезаряжаются. Серебряно-цинковые батареи намного эффективнее: их удельная энергия в три-четыре раза больше, чем у свинцовых аккумуляторов, но они гораздо дороже и требуют более квалифицированного обслуживания.
Перспективны и другие виды аккумуляторов, в том числе и те, что применяются на спутниках: никелево-кадмиевые и серебряно-кадмиевые (удельная энергия 25 и 70 Вт.ч/кг соответственно). Большие возможности открывает применение в аккумуляторах пары сера - сернокислая медь, с удельной энергией 300 Вт.ч/кг, но такие батареи еще только испытываются в лабораториях.
В последние годы создано несколько типов топливных элементов, которые можно использовать в энергетических установках малой мощности. Такая энергетическая установка, мощностью всего 10 кВт, работала на борту американских "Аполлонов".
Применение топливных элементов позволит в перспективе увеличить дальность плавания подводных аппаратов, хотя для этого и придется еще решить ряд технических проблем. Преимущество такой энергетической установки перед аккумуляторами состоит также в сокращении времени зарядки, в меньшем весе. Срок службы топливных элементов зависит от ресурса электродов, который может превышать 1000 часов.
Долгое время применение их было ограничено из-за высокой стоимости платины (теперь уже разработаны более дешевые топливные элементы, не требующие использования этого благородного металла). Кроме того, водородно-кислородные топливные элементы, выпускаемые промышленностью, требуют стабильности температуры, давления и плотности электролита, чего трудно добиться на борту подводного аппарата. Этого недостатка не имеют топливные элементы на гидразине и кислороде. Однако гидразин дорог.
Первые серьезные исследования возможности применения топливных элементов в качестве источника энергии были проведены в Швеции на подводных лодках военно-морского флота. По проекту фирмы "АСЕА", водород предполагалось получать путем крекинга аммиака, однако габариты и вес необходимого для такой энергетической установки оборудования оказались слишком большими. Поэтому проект не был осуществлен.
Мы уже говорили о преимуществах атомных энергетических установок, но при современном уровне развития техники они пригодны только для подводных лодок большого водоизмещения.
Виды движителей
Как для подводных аппаратов, так и для надводных судов наиболее эффективным видом движителей продолжают оставаться винты. Правда, водометные движители обеспечивают аппарату большую маневренность, но их коэффициент полезного действия невелик. По-видимому, в обозримом будущем не появится никаких принципиально новых движителей.
Винты подводных аппаратов приводятся во вращение электрическими моторами. Иногда применяются также гидравлические моторы. Обычно и те, и другие располагаются в легком корпусе, так как на больших глубинах очень трудно обеспечить герметичность сальников гребных валов.
Расположение гребных валов винтов позволяет аппарату перемещаться вверх или вниз, вперед или назад, а также разворачиваться на месте. На некоторых аппаратах предусмотрена специальная система, управляющая положением оси гребных валов, что позволяет использовать одни и те же винты для движения и в горизонтальной, и в вертикальной плоскости.
Как правило, на подводных аппаратах применяют электромоторы постоянного тока. Однако электромоторы переменного тока позволяют более плавно регулировать число оборотов гребного вала, кроме того, они не имеют токосъемников и коллекторов. Но поскольку аккумуляторы и топливные элементы дают постоянный ток, то нужны преобразователи для получения переменного тока. Преобразователи обычно приходится размещать в прочном корпусе. Появившиеся в последние годы преобразователи тока на тиристорах легче, чем обычные умформеры, но имеют ряд недостатков, которые, впрочем, вполне устранимы.
И все же проще использовать гребные электромоторы постоянного тока, с двумя-тремя скоростями, переключаемыми реостатом. Нужно только предотвратить быстрое загрязнение щеток и коллекторов, что связано с размещением моторов в заполненных маслом контейнерах, которые, как мы уже говорили, устанавливаются за пределами прочного корпуса. Это загрязнение, ограничивающее срок службы гребных электродвигателей, происходит тем быстрее, чем на больших глубинах работает аппарат (причина этого явления еще неясна - возможно, повышение давления вызывает изменение внутренней структуры графита).
Загрязнения коллекторов и щеток можно избежать, разместив электромоторы в наполненной инертным газом капсуле, давление в которой должно постоянно уравниваться с забортным гидростатическим давлением во время погружения и всплытия аппарата. Можно применить и некоторые другие технические решения, которые, однако, потребуют дополнительных затрат.
Итак, приходим к выводу, что наилучшее решение - бесколлекторный двигатель постоянного тока...
Иллюминаторы
Иллюминаторы обычно изготовляются из плексигласа. Они имеют форму усеченного конуса, меньшее основание которого находится внутри прочного корпуса. Вокруг отверстий, в которые вставляется иллюминатор, для усиления корпуса устанавливаются специальные кольцевые ребра жесткости. При визуальном наблюдении через иллюминатор существенное значение имеет то, какое положение занимают относительно него наблюдатели - пилот, оператор манипулятора и т. д.
В аппаратах типа "ныряющего блюдца" пилот управляет лежа - такое положение обеспечивает ему максимальный обзор. Наблюдатель - он же оператор манипулятора - также работает лежа и имеет такой же сектор обзора. Таким образом, в аппаратах подобного типа и пилот, и оператор одновременно наблюдают за обстановкой за бортом.
В других аппаратах экипаж работает сидя. Это, конечно, менее утомительно и более удобно, чем работать лежа в течение нескольких часов. Однако при этом уменьшается сектор обзора. Кроме того, преломление и рассеяние световых лучей на границе водной и воздушной сред также ухудшает условия наблюдения.
Возможности визуального наблюдения под водой можно расширить, применяя специальную оптическую аппаратуру, замкнутые телевизионные системы (они установлены, в частности, на подводных аппаратах "DSRV" и "Дип Квест"), перископы, при помощи которых экипаж видит происходящее под и над аппаратом (установлены на "DOWB"), различные виды прожекторов и рефлекторов, волоконную оптику...
В общем, нужно использовать все возможности для того, чтобы улучшить условия визуального наблюдения под водой.
Контроль состава атмосферы в подводном аппарате
Контроль состава атмосферы заключается, по сути дела, в удалении из нее углекислого газа и различных запахов, в обеспечении необходимого процентного содержания кислорода, а также в уменьшении влажности.
Обычно удаление углекислого газа достигается установкой нужного числа кассет с абсорбентом - кальцинированной содой. Запахи поглощаются активированным углем. В качестве абсорбентов можно использовать и другие вещества. Для снижения уровня влажности применяется силикагель.
Атмосфера подводного аппарата пополняется кислородом автоматически или вручную, для чего открывают вентили редукторов запасных баллонов со сжатым кислородом. Запас кислорода зависит от заданной автономности. Для небольших подводных аппаратов он рассчитан примерно на сутки.
В последнее время в подводных аппаратах начинают применять для регенерации перекись калия. Это химическое вещество, которое давно уже использовалось на военных подводных лодках, обладает способностью, поглощая углекислый газ, выделять эквивалентное ему количество кислорода. Некоторое время назад от него отказались из-за нестабильности протекающей реакции, вызванной спеканием его гранул. Сейчас французская фирма "Эр ликид" выпускает этот химический продукт в виде таблеток, которые, как показали результаты испытаний, обеспечивают стабильность реакции поглощения углекислого газа и выделения кислорода.
Телеманипуляторы
Телеманипуляторы наиболее широко используются в атомных научно-исследовательских центрах при проведении различных работ с предметами, находящимися в радиационно опасной зоне. За последние пятнадцать лет они значительно усовершенствовались. Конструкторы создали телеманипуляторы, воспроизводящие на расстоянии - через толстый защитный экран - движения руки и пальцев оператора.
Что же нужно для создания "телеруки"?
Чтобы обеспечить возможность движений в трехкоординаной системе, необходимо воспроизвести движения перемещения и вращения (это составляет шесть степеней свободы), а также сжимания или захвата (седьмая степень свободы). Конечно, вовсе не обязательно, чтобы каждый манипулятор имел все перечисленные степени свободы. Простейший манипулятор - сахарные щипцы, обладающие всего лишь одной степенью свободы, позволяющей сделать захват. Чтобы перейти к другим видам движения, приходится использовать шарнирные соединения, имитирующие суставы нашей руки.
Обычно системы телеманипуляции делят на два типа.
Первый из них - так называемые системы "повелитель - раб" (копирующие манипуляторы), широко применяющиеся для работы в радиационно опасных зонах. Они состоят из "командной руки", находящейся в "чистой" зоне, и "подчиненной руки", действующей в "загрязненной" зоне и воспроизводящей все движения "командной". При передаче управляющего движения от "командной руки" к "подчиненной" действию - если в том есть нужда - сообщается необходимое усиление. Команды из одной зоны в другую подаются по кабелям, проходящим через разделяющий защитный экран. Именно по этой причине системы "повелитель - раб" не годятся для подводных аппаратов, так как кабели, пронизывая прочный корпус, усложняют его герметизацию и уменьшают прочность.
На подводных аппаратах нашли применение телеманипуляторы второго типа, которые не воспроизводят движения руки, а просто позволяют осуществить ряд элементарных движений: перемещение в пространстве, вращение, захват. Управление ими осуществляется со специального пульта, расположенного внутри прочного корпуса. Рабочие органы манипулятора приводятся в действие гидравлическими или электрическими приводами, причем исполнительные двигатели и усилители команд управления находятся в легком корпусе.
В этом случае через прочный корпус проходит только один кабель, по которому передаются сигналы команд.
'Рука' телеманипулятора в действии
Промышленность еще не выпускает серийных манипуляторов. Для каждого подводного аппарата фактически создается своя оригинальная конструкция, иногда простая, иногда очень сложная (последнее, впрочем, вовсе не говорит ни о ее достоинствах, ни о ее эффективности).
Все эти модели существенно отличаются по своим возможностям. Одни из них способны выполнять лишь простейшие операции - например, поднять легкий предмет, причем аппарат должен совершить для этого маневр, компенсируя ограниченные возможности манипулятора. Другие - выполняют самые разнообразные работы. Сложные манипуляторы способны поднять груз в 100 кг и вместе с тем взять яйцо не менее осторожно, чем рука человека.
Манипулятор, который воспроизводит движения руки человека, сложен по конструкции, а следовательно, стоит немалых денег. Поэтому сейчас уже не стремятся к тому, чтобы он точно воспроизводил движения человеческой руки. Рука манипулятора в системе "повелитель - раб" не в состоянии сделать многое из того, что требуется делать при подводных работах, так как она может совершать только относительно простые действия - взять образец, закрепить кабель... Для того чтобы открывать или закрывать вентили подводных трубопроводов, соединять конструкции болтами и выполнять другие подводные работы - а все эти операции требуют значительных усилий,- нужно иметь возможность дистанционно заменять один инструмент другим. Со всеми этими операциями могут справиться телеманипуляторы, рассчитанные на выполнение ограниченного числа операций и применяемые для решения совершенно конкретных задач.
Навигация и связь
Подводная лодка перемещается в водной толще в трех измерениях - как самолет в воздухе. И так же, как летательный аппарат, подводная лодка должна иметь приборы, которые в любой момент позволяют определить ее координаты, а также поддерживать связь со своей базой, с другими подводными лодками и объектами на поверхности.
При непродолжительном погружении на малые глубины, где солнечный свет проникает до самого дна, в крайнем случае можно обойтись и без навигационного оборудования. Экипаж такого аппарата может визуально ориентироваться по реперам, выставленным заранее на дне (например, по буйкам). Но ориентироваться таким образом под водой допустимо разве что при фото- или киносъемках подводных красот. А экипаж обитаемых аппаратов, выполняющий научные или производственные задания, обязательно должен точно знать свои координаты.
Быстро и с достаточной точностью позволяют определить место подводного аппарата гидроакустические навигационные системы (подобная аппаратура установлена, например, на борту "DSRV" и "Дип Квеста"). Это устройство позволяет получить графическое изображение пройденного пути, который вычерчивается на специальном планшете; кроме того, оно обеспечивает автоматическое управление подводной лодкой.
При использовании гидроакустических навигационных систем место подводного аппарата определяется в относительной системе координат, образованной предварительно установленными гидроакустическими реперами. Такие реперы могут работать или в режиме постоянного излучателя, подавая с заданной периодичностью гидроакустические сигналы на определенной частоте (так называемые пинджеры), или как гидроакустические ответчики (так называемые транспондеры), излучающие сигнал только при получении запроса от гидролокатора подводного аппарата. Пеленгуя пинджер, можно определить направление на него и выйти в точку, где он установлен. Поэтому их обычно используют в качестве приводных маяков, которые помогают найти на дне нужный объект, научные приборы и т. д. Для собственно навигационных целей используют обычно транспондеры, ответ которых на запрос позволяет определить и пеленг, и расстояние между ним и подводным аппаратом, что дает возможность получить свои координаты.
Пеленгуясь по нескольким транспондерам, работающим на разных частотах, можно еще точнее определить свое местоположение.
Однако подводному аппарату нужны не относительные, а абсолютные, т. е. географические, координаты. Для этого точки размещения гидроакустических реперов привязывают к карте, что делается при помощи либо береговых навигационных ориентиров, если до берега недалеко, либо береговых или спутниковых радионавигационных систем. Такую привязку делает надводное судно обеспечения, работающее в паре с подводным аппаратом.
Надводное обеспечивающее судно, как правило, находится над гидроакустическими реперами, контролируя по ним свое местоположение. Подводный аппарат и надводное судно поддерживают между собой постоянную связь по гидроакустическому каналу. С аппарата периодически сообщают на поверхность о своих действиях, курсе, скорости, расстоянии до грунта и глубине погружения.
На практике выполнить все то, о чем мы только что рассказали, не так просто. Экипаж подводного аппарата должен иметь большой опыт плавания и взаимодействия с надводным обеспечивающим судном, чтобы эффективно использовать гидроакустические реперы и прочие средства гидроакустической связи.
Мы не будем продолжать описание различного оборудования, входящего в бортовую навигационную систему океанологического подводного аппарата - эхолота и глубиномеров, гирокомпаса, допплеровских гидролокаторов, позволяющих измерять скорость относительно дна, поисковых гидролокаторов и пр.
Все это уже достаточно известно.
Лучше поговорим более подробно о некоторых подводных аппаратах.
Батискафы
Изобретатель батискафов профессор Огюст Пиккар достиг блестящих результатов, использовав при создании глубоководных обитаемых аппаратов принципы воздухоплавания, известные еще со времени монгольфьеров. Многие уже забыли, что воздушные шары и дирижабли позволили людям освоить низшие слои атмосферы, а стратостаты помогли достигнуть преддверия космоса. В 1932 г. О. Пиккар и М. Косинс на борту стратостата "FNRS"*, построенного Пиккаром под эгидой Национального фонда научных исследований Бельгии, достигли высоты 16 900 м.
* (FNRS - аббревиатура, образованная из начальных букв названия Национального фонда научных исследований Бельгии.- Прим. перев.)
В середине 30-х годов Пиккар решил спуститься с небес в пучины моря. Но проект принципиально нового вида глубоководных аппаратов удалось реализовать не сразу - помешала война. Однако уже в 1945 г. Пиккар приступил к строительству батискафа.
Принцип
Идея проекта Пиккара удивительно проста.
Для того чтобы люди могли спуститься в глубины океана, нужна герметичная капсула, которая выдерживала бы чудовищное давление. Такая капсула неизбежно будет очень тяжелой, а следовательно, будет иметь большую отрицательную плавучесть. Значит, нужно компенсировать ее вес, прикрепив к капсуле поплавок с жидкостью, более легкой, чем вода. В качестве таковой Пиккар решил использовать... бензин. Поместить бензин можно было бы и в эластичную оболочку, но, учитывая необходимость обеспечения маневренности аппарата, удобство его обслуживания при эксплуатации, а также воздействие волн в надводном положении, поплавок изготовили из тонких листов стали.
Поплавок - от него не отказались и на сегодняшних батискафах - через трубы сообщается с окружающей морской водой. Тем самым компенсируется изменение объема бензина под воздействием гидростатического давления. Так как у воды и у бензина разный удельный вес, можно не бояться, что они смешаются.
Каким образом меняется плавучесть батискафа при погружении и всплытии? Нужная плавучесть достигается соответствующим изменением объема бензина и веса балласта - дроби,- удерживаемого в бункерах электромагнитами.
При погружении под действием гидростатического давления, а также из-за снижения температуры окружающей среды бензин сжимается. Следовательно, с глубиной вес аппарата возрастает. (Правда, одновременно происходит увеличение плотности морской воды и разогрев бензина при его сжатии, однако эти' факторы не компенсируют увеличения веса батискафа.) Поэтому, если погружение происходит слишком быстро, приходится сбрасывать часть балласта, отключая определенные группы электромагнитов. Может случиться, что балласта сбросят больше, чем надо, и погружение слишком замедлится или вообще прекратится. Тогда при помощи дистанционно управляемого клапана из поплавка стравливают часть бензина, плавучесть аппарата уменьшается, и он вновь начинает погружаться.
Первые батискафы "приземлялись" на дно с помощью гайдропа - якорной цепи или висящего на тросе груза. Как только цепь или груз касались грунта, общий вес аппарата уменьшался, плавучесть его становилась положительной - и батискаф "вставал на якорь".
Однако от применения гайдропов пришлось отказаться: когда гайдроп касается грунта, со дна поднимаются осадки и видимость резко ухудшается.
Современные батискафы "приземляются", руководствуясь показаниями эхолота. При приближении ко дну пилот уменьшает скорость погружения и останавливает аппарат на определенном расстоянии от дна. Придав батискафу нулевую плавучесть, он ведет его над дном, маневрируя при обходе подводных препятствий с помощью вертикальных рулей. Выполнив намеченную программу работ, пилот отключает электромагниты, сбрасывая балласт на дно,- и облегченный аппарат устремляется к поверхности.
Эволюция батискафа
Первое поколение
Первый батискаф, "FNRS-II"*, был построен в Бельгии. Его испытания проводились в 1948 г. при участии военно-морских сил Франции.
*(О. Пиккар назвал батискаф "FNRS-II", так как его стратостат носил* название "FNRS-I".- Прим. перев. )
Первые же спуски показали, что аппарат, прекрасно приспособленный к плаванию под водой, беспомощен даже при легком волнении на поверхности и что форма поплавка, представляющего собой легкую конструкцию, крепящуюся к сфере прочного корпуса, не отвечает элементарным требованиям гидродинамики...
Оказалось также, что на предшествующие погружению подготовительные операции уходит много времени и сами операции весьма сложны. Так, экипаж должен был занимать свои места в батискафе еще до того, как судовой кран поднимет его из трюма и опустит на воду. Затем аппарат ошвартовывался у борта судна и начиналась заправка поплавка бензином при помощи специального шланга, на что уходило несколько часов. Усилившееся волнение могло сорвать погружение.
Опытным морякам хорошо известно, как часто то, что казалось безусловной истиной при проектировании, не выдерживает испытания в море, как конструктивные недостатки, не столь существенные в хорошую погоду, оборачиваются катастрофой во время шторма.
С этими известными истинами пришлось столкнуться и творцу первого в мире батискафа.
Когда все подготовительные операции остались позади, батискаф совершил свое первое погружение. Аппарат без экипажа опустился на глубину 1380 м и благополучно всплыл на поверхность. Тем временем сильный ветер развел волну. Не выдержав ударов волн, треснул и дал течь поплавок. Еще немного - и катастрофа была бы неминуемой. К счастью, обеспечивающему судну удалось отбуксировать сильно поврежденный батискаф в Дакар.
Карьера первого батискафа была довольно короткой, а результаты его испытаний в океане несколько разочаровали энтузиастов покорения глубин, так как рекорд батисферы У. Биба превзойден не был. Однако они продолжали возлагать надежды на аппарат подобного типа, ибо понимали, что, хотя испытания батискафа и окончились неудачей и аппарат, безусловно, не удовлетворяет всем необходимым требованиям, сам принцип Пиккара тем не менее безупречен.
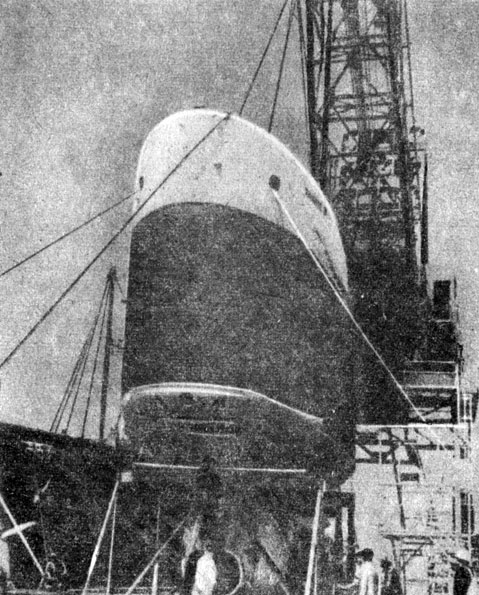
Батискаф 'Триест'
Второе поколение
В соответствии с соглашением с Национальным фондом научных исследований Бельгии французский военно-морской флот приступил к усовершенствованию батискафа. Конструкторскими доработками занимался капитан-лейтенант Ж. Уо под руководством инженера Ж. М. Темпа, а затем инженера П. Вильма.
Изменения в конструкции были столь значительны, что батискаф получил новое название - "FNRS-III". После трех успешных погружений он вошел в состав военно-морских сил Франции.
"FNRS-III" получил в наследство от своего предшественника прочный корпус, но обводы его легкого корпуса и поплавка были значительно улучшены. Усовершенствованная система заправки позволяла теперь буксировать батискаф с заполненным поплавком. Таким образом, отпала и необходимость каждый раз перед погружением наполнять поплавок бензином, а потом снова осушать его, перекачивая бензин на судно после всплытия батискафа на поверхность. На палубе батискафа, как и у военных подводных лодок, появилась рубка, из которой через шахту, проходящую сквозь поплавок, экипаж спускался к люку прочного корпуса. При погружении шахта заполнялась водой, а после всплытия на поверхность продувалась сжатым воздухом. Таким образом, экипаж теперь мог входить в батискаф непосредственно перед погружением и покидать его после всплытия, не дожидаясь подъема аппарата на борт обеспечивающего судна.
В 1954 г. Ж.Уо и П.Вильм на "FNRS-III" погрузились близ Дакара на глубину 4050 м. Наконец-то батискаф проник в морские глубины. С этого момента они стали доступными для научных исследований.
Вскоре Пиккар расстался с военно-морским флотом Франции: он принял в Италии заказ на строительство нового батискафа, получившего название "Триест".
В сентябре 1953 г. близ Неаполя Огюст Пиккар вместе со своим сыном Жаком погрузился на "Триесте" до глубины 3150 м, а в 1956 г. Жак Пиккар достиг глубины 3700 м.
С 1954 по 1961 г. в Атлантике, в Средиземном море и у берегов Японии "FNRS-III" совершил с научными целями 94 погружения на большие глубины. В те же годы успешно проходили и погружения "Триеста", который до 1958 г. совершил 48 спусков в Средиземном море. В 1958 г. батискаф был приобретен военно-морскими силами США.
Третье поколение
Батискафы второго поколения успешно покоряли большие глубины. Однако при этом выявились и некоторые их существенные недостатки - невозможность размещения нужного для научных исследований оборудования, неприспособленность аппаратов к длительной буксировке и сложность самой буксировки, ограниченный радиус передвижений на дне. Добавим, что батискафы второго поколения на первом этапе по своим техническим данным не смогли достичь глубочайших впадин абиссальных равнин океана.
Все это послужило основанием для того, чтобы в 1958 г. военно-морской флот Франции приступил к строительству нового батискафа, который получил название "Архимед". Справедливость требует, чтобы мы подробно рассказали об этом замечательном аппарате. При этом мы ни в коей мере не оспариваем достижений Огюста Пиккара и его первенства в практическом применении принципов воздухоплавания к глубоководным аппаратам.
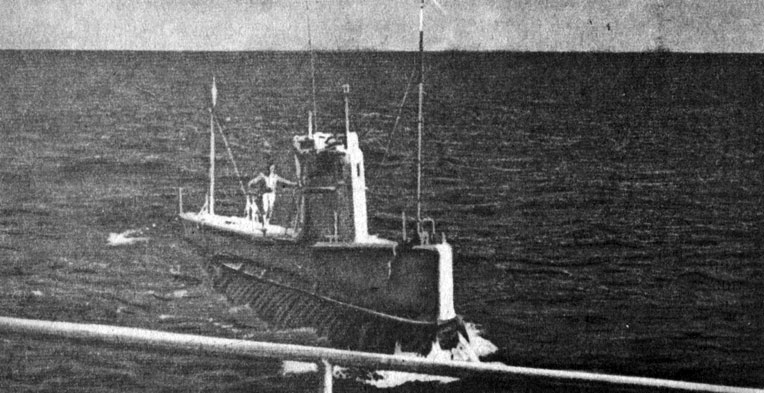
Батискаф 'Архимед', буксируемый 'Марселем ле Биан'
Решение сконструировать новый батискаф было принято и в США.
По проекту новые батискафы - и французский, и американский - были рассчитаны на погружение на предельные глубины океана - 11 000 м.
Спущенный на воду в июле 1961 г. "Архимед" имел ряд преимуществ перед батискафами второго поколения: увеличилась емкость аккумуляторных батарей, улучшилась маневренность аппарата в подводном положении, появилось больше места для установки научного оборудования внутри сферы и вне ее. Значительно улучшились гидродинамические качества легкого корпуса "Архимеда": сферу его "утопили" в поплавок, что позволило буксировать батискаф при слабом волнении со скоростью до 8 узлов.
В октябре 1959 г. "Триест" был доставлен на Тихий океан, где и совершил после ряда попыток погружение на фантастическую глубину - 10919 м.
В марте 1962 г. отправился туда же - на Тихий океан - и "Архимед". Было решено достигнуть дна глубоководной Курильской впадины, глубина которой, по данным промеров советских океанографов, составляла 10 50Q м. Этот район выбрали еще и по той причине, что рядом была Япония, где в случае надобности можно было бы получить необходимую помощь.
Глубины, отмеченные на карте учеными, так и не были найдены. И "Архимед", на борту которого находились пилот лейтенант О.Бирн и представитель CNRS А. Ж. Делоз, совершил погружение на глубину 9545 м. Естественно, что это несколько разочаровало французов, которые намеревались если не превысить, то, во всяком случае, повторить результаты спуска американцев.
Разумеется, никакого соревнования в достижении наибольшей глубины никто не устраивал, хотя именно так пытались представить дело газеты, помещавшие информацию о погружениях батискафов под огромными заголовками. Совершив глубоководное погружение, "Архимед" успешно завершил этап испытаний. Уо, Вильм, а вместе с ними и научный мир имели все основания испытывать удовлетворение достигнутыми результатами.
В 1963 г., учтя опыт погружений у берегов Японии, французы занялись усовершенствованием конструкции "Архимеда". Одновременно в США приняли решение сконструировать для "Триеста" новый поплавок, увеличить мощность аккумуляторных батарей и установить дополнительные гребные электродвигатели.
Но в апреле того же года произошла катастрофа с американской атомной подводной лодкой "Трешер"... "Триест" срочно доставили к месту ее гибели, не успев провести запланированную модернизацию. Как только обломки "Трешера" были обнаружены при помощи поисковых средств надводных кораблей, батискаф начал погружения на дно Атлантики. Экипаж "Триеста" тщательно обследовал лежащие на дне остатки атомохода. Некоторые обломки были доставлены батискафом на поверхность.
Эти работы велись в штормовом районе Атлантики, и поплавок "Триеста" получил серьезные повреждения. Батискаф был демонтирован и отправлен в Сан-Диего. Зимой 1963-64 г. велись работы по его модернизации, был изготовлен новый поплавок. Теперь батискаф стал называться "Триест-II".
Не бездействовал и "Архимед".
После погружений у берегов Японии он успешно выполнял самые различные задания на благо науки. В 1964 г. батискаф доставляют в США для участия в совместной франко-американской экспедиции по изучению глубоководного желоба Пуэрто-Рико. Затем погружения в Средиземном море, участие в экспедициях у берегов Греции, близ Тулона... И опять Атлантика - остров Мадейра, Азорские острова. В 1967 г. вновь погружения на океанское дно в районе Японских островов и новая интересная информация. В 1968 г. "Архимед" участвует в поисках пропавшей подводной лодки "Минерва". Но определить с достаточной точностью район гибели лодки не удалось, и погружения "Архимеда" не принесли успеха.
С 1969 г. "Архимед" перешел из ведения CNRS в ведение Национального центра по эксплуатации океанов (CNEXO). В 1970 г. батискаф принял участие в обследовании затонувшей подводной лодки "Эвридика".
О замечательной операции по спасению "ныряющего блюдца" "SP-3000" в 1971 г. мы уже рассказали ранее.
Будущее батискафа
В 1961 г. по техническим причинам предельная глубина погружений батискафа "Триест" была ограничена 4000 м. И начиная с этого времени французский батискаф "Архимед" стал единственным глубоководным аппаратом, способным достигнуть дна Мирового океана в любой его точке.
Недостатки "Архимеда" - так сказать, детские болезни его роста - были преодолены. Но работа по совершенствованию батискафа продолжается.
Каждый год, зимой, когда шторма мешают проведению глубоководных погружений, "Архимед" проходит тщательный осмотр, ремонтируются его корпус и оборудование. Одновременно что-то в аппарате обновляется и дорабатывается - батискаф должен отвечать растущим требованиям ученых-океанологов.
И теперь на "Архимеде" уже можно разместить 4,5 т научного оборудования - его основное преимущество перед другими аппаратами.
Какими же еще преимуществами обладает "Архимед"?
Прежде всего - это исключительно надежный аппарат, обеспечивающий экипажу абсолютную безопасность.
Далее. Он оборудован навигационными приборами, позволяющими достаточно точно определять свое местоположение, и средствами наблюдения и поиска, дающими возможность обнаруживать находящиеся на дне объекты на расстоянии до 500 м. Недавно "Архимед" получил рабочую аппаратуру, значительно расширившую возможности его использования,- телеманипулятор и буровое устройство для отбора образцов скальных пород.
Таким образом, "Архимед" - превосходное рабочее судно. Но это весьма громоздкий и тяжелый аппарат, его эксплуатация требует значительных затрат. Можно ли на этом основании говорить, что у него нет будущего? Мы так не думаем.
Прежде всего потому, что сейчас это единственный в мире глубоководный обитаемый аппарат, способный погрузиться на глубину 11000 м; только "Архимед" может поднимать со дна на поверхность тяжелые грузы. Это позволяет использовать батискаф и для строго научных, и для производственных целей.
Кроме того, ни один другой аппарат не в состоянии взять на борт столько научной аппаратуры, сколько берет "Архимед". Конечно, для научных исследований важно не только то, сколько научного оборудования размещается на борту судна, но и то, сколь эффективно оно используется.Однако подобные требования относятся не столько к батискафу, сколько к тем, кто его эксплуатирует.
Нередко необходимость буксировки батискафа к точке погружения упоминают как едва ли не главный его недостаток. Безусловно, это один из минусов аппаратов такого типа. Но при габаритах и весе батискафа для его транспортировки потребовалось бы судно очень большого водоизмещения, к тому же обладающее специальным оборудованием для спуска и подъема аппарата.
Конечно, можно было бы резко снизить вес аппарата, ограничив предельную глубину его погружения 6000 м.
Стоит или не стоит это делать? На эту тему можно спорить до бесконечности, особенно если рассматривать этот вопрос с позиций экономистов, инженеров и ученых одновременно. Но истина, вероятно, заключается в том, что нельзя отступать с уже завоеванных рубежей.
Сегодня мы умеем погружаться на 11 000 м. Неужели же мы должны отказаться от этого достижения? Научный и технический прогресс может снизить свои темпы и даже приостановиться на какое-то время, но он редко обращается вспять.
Подобной точки зрения придерживаются многие ученые и инженеры. Но тем, от кого зависит финансирование исследований, она не кажется убедительной. Владельцы капиталов хотят заранее быть уверенными, что научные эксперименты принесут практическую пользу, они заранее хотят знать, какие вложения от них потребуются.
Я глубоко убежден, что и в 1948 г., и в 1972 г. погружения на океанское дно имели одинаковое практическое значение, поскольку и на первой стадии из этих погружений можно извлечь некоторую практическую пользу. Безусловно, полтора десятка лет тому назад технические возможности батискафов опережали потребности науки. Но они были прекрасным средством для познания Мирового океана и дали мощный толчок ускоренному развитию океанологических исследований. События развиваются быстро, и ныне исследования океана наряду с научными результатами приносят все более ощутимый экономический эффект.
Полиметаллические конкреций, устилающие дно Тихого океана, пока еще не интересуют промышленные компании в такой степени, как подводные нефтяные месторождения. Однако они все больше и больше интересуют океанологов и некоторых дальновидных промышленников.
В 1973 г. CNEXO планирует провести исследования Срединно-Атлантического хребта.* Это будет исключительно важный этап в познании строения нашей планеты, который обогатит геологию и геофизику новыми данными. Вооружившись знаниями, полученными во время исследования таинственных рифтовых долин Атлантики, геологи и геофизики наверняка пожелают спуститься, так сказать, по проложенному пути в глубоководные впадины Тихого океана, чтобы собственными глазами увидеть признаки, свидетельствующие о медленном погружении гигантских плит земной коры вдоль глубоководных впадин. Геофизик К. Ле Пишон писал: "Именно из-за того, что до сих пор люди не предприняли достаточных усилий для исследования океанских просторов, они обрекли себя на полное непонимание структуры материков, на которых живут".
* (Об этих исследованиях уже упоминалось в примечании на стр. 180.- Прим.ред.)
Провести такие исследования поможет батискаф.
"Ныряющие блюдца"
Подводные обитаемые аппараты этого типа появились почти одновременно с батискафом. Инициатором их создания был Жак-Ив Кусто.
Идеи, лежащие в основе проекта "ныряющего блюдца", не менее оригинальны, чем те идеи, на основе которых был создан батискаф.
Прежде всего, Кусто решил, что его подводный обитаемый аппарат не должен быть миниатюрной копией подводных лодок военно-морских флотов. Его не устраивало то, что подводные лодки предназначены в основном для передвижения в горизонтальной плоскости, что обводы их корпуса обязательно должны быть рассчитаны на длительные переходы в надводном или крейсерском положении, что, кроме электронных и акустических приборов, они не имеют других устройств для визуальных наблюдений и исследовательских работ на дне.
Кусто не стремился также создать аппарат, который мог бы заниматься подводными работами: в 1956 г. такая задача еще не была актуальной. Он хотел, чтобы исследователи глубин получили аппарат, который дал бы возможность свободно перемещаться и маневрировать под водой, вести визуальное наблюдение, фотографировать, собирать образцы донных пород на глубинах, которые недоступны для водолазов. При этом Кусто хотел, чтобы габариты и вес аппарата позволяли бы транспортировать его не только в любую точку Мирового океана, но даже в такие экзотические места, как, например, озеро Титикака или подземный источник Воклюз...
И, наконец, Кусто хотел, чтобы его аппарат был мобилен, так сказать, во времени и пространстве, т. е. чтобы его могло транспортировать и обеспечивающее судно небольшого водоизмещения, которое быстро доставляло бы его в район погружений.
Технические данные аппарата Кусто - он назвал его "ныряющим блюдцем" - это своеобразный компромисс между всеми изложенными выше требованиями.
Кусто решил, что водоизмещение и вес "блюдца" должны быть минимальными; минимальной должна быть и стоимость аппарата, чтобы не отпугнуть ученых и всех тех, кто будет арендовать аппарат для научных исследований, непомерной арендной платой. Поэтому пришлось отказаться от слишком сложного и тяжелого оборудования. Но несмотря на это "блюдце" должно обладать отличной маневренностью и двигаться под водой с такой же легкостью и точностью, как подводный пловец. Кусто хотел, чтобы управление аппаратом скорее соответствовало бы навыкам водолаза, чем профессионала-подводника, привыкшего к плаванию на субмаринах водоизмещением в сотни и тысячи тонн. Идеи Кусто нашли воплощение в пяти подводных обитаемых аппаратах типа "ныряющего блюдца":
- "SP-350"; двухместный 350 м;
- "SP-500" (два аппарата); одноместные 500 м;
- "SP-3000"; трехместный 3000 м;
- "Дип Стар"; трехместный 1200 м;
"SP-350" и "SP-500" принадлежат группе Кусто, "SP-3000" - CNEXO, "Дип Стар" - фирме "Вестингауз".
Характерные особенности
Несмотря на отличия, обусловленные разной рабочей глубиной погружения, "ныряющие блюдца" обладают рядом общих характерных особенностей.
Основу их конструкции составляет прочный корпус, имеющий форму полуэллипсоида ("SP-350"), цилиндра ("SP-500") или полусферы ("SP-3000", "Дип Стар"). Гребные электродвигатели, аккумуляторные батареи, осветительные приборы и дифферентная система вынесены за пределы прочного корпуса. Все это оборудование находится внутри легкого негерметичного корпуса, изготовленного из полистирола, и, следовательно, испытывает действие забортного гидростатического давления. В соответствии с проектом все "ныряющие блюдца" в воде имеют нулевую плавучесть - излишний вес компенсируется практически несжимаемым твердым наполнителем с положительной плавучестью.
Аппараты такого типа не рассчитаны на плавание в надводном положении. "Блюдце", всплывающее на поверхность, "не видит" горизонта. Таким образом, в надводном положении аппарат может совершать переходы только "вслепую", и, следовательно, его должно сопровождать надводное судно.
"Блюдце" "SP-350", построенное в 1956 г. и совершившее около тысячи погружений, а также аппараты "SP-500" (так называемые "морские блохи"), вступившие в строй в 1966 - 1967 гг., хорошо известны читателю. Поэтому мы расскажем более подробно только о последнем "блюдце" - "SP-3000".
"SP-3000"
Этот небольшой аппарат предназначен в основном для наблюдения за обитателями подводных глубин и изучения океанского дна.
Небольшие габариты (длина - 5,7 м; ширина - 3,4 м; высота - 2,1 м) и вес (7,5 т) позволяют транспортировать "SP-3000" на судне малого водоизмещения и даже на самолете. Обеспечивающее судно также может быть небольшим.
Прочный корпус "блюдца" выполнен из стали "васкоджет" (предел текучести - 90 - 95 кг/мм2), толщиной 30,5 мм. Аппарат имеет два иллюминатора из плексигласа, выполненные в виде усеченного конуса (внутренний диаметр - 11 см, толщина - 10 см), и еще один иллюминатор с внутренним диаметром 4,6 см. Первые два иллюминатора предназначены для визуальных наблюдений, а третий - для киносъемок. Члены экипажа попадают внутрь аппарата через расположенный в верхней части прочного корпуса люк диаметром 40 см.
"SP-3000" приводится в движение двумя винтами, которые вращаются двумя погружными асинхронными гребными электродвигателями мощностью 3 л. с. каждый. Их гребные валы связаны с роторами электродвигателей без редукторов. Источник энергопитания аппарата - свинцово-кислотные аккумуляторные батареи, состоящие из шестидесяти двух элементов общим весом 1400 кг. Батареи погружены в контейнеры, заполненные маслом; их емкость - 350 А.ч при напряжении 125 В.
Преобразование постоянного тока в переменный осуществляется двумя статическими тиристорными преобразователями, выдающими стабильное напряжение частотой от 2 до 65 Гц и мощностью 5 кВт.ч. Такая схема требует довольно сложной регулировки, но зато обеспечивает плавное изменение скорости.
Вес прочного корпуса и всего оборудования, имеющего отрицательную плавучесть (аккумуляторные батареи, электродвигателе преобразователи, балласт и т. д.), компенсируется твердым наполнителем с положительной плавучестью - синтактическими пеноматериалами.
Спуск 'SP-3000' на воду
Регенерация дыхательной смеси жилого отсека - удаление углекислого газа - осуществляется с помощью поглотителя из гранулированной кальцинированной соды; кислород подается по мере надобности из баллона, находящегося внутри прочного корпуса.
Автономность аппарата по запасу дыхательной смеси составляет 48 часов, по электроэнергии - около 8 часов (это зависит от того, сколько приходится аппарату маневрировать под водой).
"SP-3000" оборудовано различной аппаратурой - гироскопическим компасом, эхолотами с диапазоном измерения глубин до 570 и до 3000 м, хронометром, самописцем, фиксирующим температуру окружающей воды и глубину погружения как функции времени, подводной звуковой связью, панорамным гидролокатором, пинджером для пеленгования "блюдца" с судна обеспечения и использования гидроакустической навигационной телеметрической системы, радиостанцией для связи на поверхности. Имеются также мощные светильники, фото- и кинооборудование. Кроме того, аппарат оборудован телеуправляемым гидравлическим захватом, который поднимает образцы со дна и укладывает их в специальный контейнер.
Эксплуатация "ныряющего блюдца"
"SP-3000" опускается с палубы обеспечивающего судна на воду при помощи крана - желательно гидравлического,- снабженного захватом, который не позволяет аппарату раскачиваться и давать крен. Благодаря съемному грузу-балласту весом 150 кг "ныряющее блюдце" погружается на дно со скоростью 1 м/сек. Получив дифферент в 50 - 60°, аппарат уходит на дно по спиралевидной траектории. Это позволяет "блюдцу" погружаться почти перпендикулярно судну обеспечения. Экипаж занимает свои места в аппарате еще до спуска его на воду.
Спуск можно ускорить, включив двигатель.
Когда "блюдце" достигает дна, пилот отдает балласт, благодаря которому производится спуск, и начинает уравновешивать аппарат, сбрасывая небольшие свинцовые пластины и заполняя водой одну из четырех балластных цистерн, расположенных в легком корпусе. Цистерны рассчитаны на большое давление и потому выполнены из титана. Дифферентовка завершается перекачкой ртути из носа в корму или наоборот (ртутная дифферентная система находится в легком корпусе).
Балласт сброшен, дифферентовка закончена - аппарат готов к плаванию. Его максимальная скорость в подводном положении равна 3 узлам, а дальность плавания составляет около 20 миль. Аппарат совершает повороты реверсами двух своих гребных электродвигателей. Регулируя число оборотов правого и левого винтов, пилот удерживает "блюдце" на нужном курсе.
В случае аварии из дифферентной системы стравливают ртуть (120 кг), отдают носовую аккумуляторную батарею (470 кг) - и аппарат, получив положительную плавучесть, равную 590 кг, стремительно всплывает на поверхность. Отдать балласт и носовую аккумуляторную батарею можно как с помощью гидравлической системы управления, так и вручную - такое "дублирование" гарантирует максимальную надежность всплытия.
При обычном всплытии отдается груз-балласт. Отдав балласт, аппарат, как и при погружении, приобретает дифферент в 50°. Включив двигатели, "блюдце" может увеличить скорость подъема к поверхности до 0,75 м/сек.
В надводном положении верхняя часть "SP-3000" лишь незначительно выступает из воды. Поэтому на случай сильного волнения предусмотрена пневматическая рубка, через которую экипаж и выбирается из аппарата. Она наполняется воздухом, когда экипаж находится еще внутри "блюдца", и прикрывает люк, ведущий в жилой отсек, от волн.
Таким образом обеспечивается относительно безопасный выход экипажа и уменьшается вероятность попадания воды внутрь прочного корпуса.
"SP-3000" - превосходное средство для научных исследований. На борту аппарата можно устанавливать самые различные приборы (учитывая, конечно, их вес, габариты и потребление энергии) - в зависимости от поставленных в каждом конкретном случае задач.
Возможности "SP-3000" еще больше увеличатся, когда имеющийся на нем захват для взятия проб будет заменен более совершенным телеманипулятором,- аппарат сможет поднимать со дна грузы на глубинах до 3000 м.
Правда, грузоподъемность "механической руки" будет невелика - менее 20 кг, так как с более тяжелым грузом аппарат просто не сможет всплыть.
После модернизации - ее намечается произвести в 1972 г.- главной задачей "SP-3000" будет подсоединение к предмету, который требуется поднять, троса, снабженного системой захвата в виде крюка, автоматически замыкающихся клещей, зажима и т. д.
Отличная маневренность, совершенные средства навигации и обнаружения и, наконец, новый телеманипулятор позволяют использовать "SP-3000" не только для научных исследований, но и для активного проникновения человека в глубины Мирового океана в целях освоения его ресурсов.
"Алвин"
"Алвин" - подводный аппарат водоизмещением около 15 т, находящийся в ведении Океанографического института в Вудс-Холе; предназначен в основном для научных исследований. Аппарат работает по одной из самых напряженных программ в мире.
Ученые - океанологи, геологи и биологи,- занимающиеся на борту аппарата научными исследованиями, работают в тесном контакте с инженерно-техническим персоналом, обслуживающим "Алвин". Такой "симбиоз" - залог успешного использования аппарата.
Как и все океанологические подводные аппараты, "Алвин" начинал свою карьеру без определенной цели - погружаясь просто для того, чтобы погружаться. Однако в дальнейшем совместными усилиями "эксплуатационников" и ученых были разработаны четкие принципы его применения. Основные тактико-технические данные аппарата таковы.
Размеры
Длина - 6,6 м; ширина - 2,4 м; высота - 4 м.
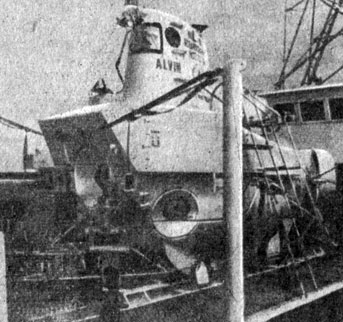
'Алвин' на борту своего судна обеспечения 'Лулу'
Экипаж
Два или три человека - два пилота и научный работник.
Вес
15 т.
Полезный груз
650 кг. Будет доведен до 1 т в 1972 г.
Жилой отсек
Сфера с внешним диаметром 2,1 м; сделана из стали марки "НУ-100", толщиной 3,4 см.
Скорость
Максимальная - 2 узла.
Автономность
По запасам электроэнергии - 7 -8 часов; по запасам дыхательной смеси - 24 часа.
Рабочая глубина
2000 м. Будет увеличена до 4000 м в 1972 г., когда стальную сферу заменят титановой.
Иллюминаторы
4 иллюминатора диаметром 12,5 см. Один иллюминатор диаметром 5 см предназначен для киносъемки.
Источник энергии
Свинцово-кислотные аккумуляторы в масляном контейнере; емкость - 36 квт-ч.
Двигатели
Масляные электронасосы обеспечивают работу двух гидравлических моторов мощностью 5 л. с. каждый. Главный винт, за счет которого аппарат совершает поступательное движение, заключен в насадку с вертикальным стабилизатором. Аппарат маневрирует с помощью двух небольших винтов, расположенных по его бортам. Все винты имеют поворотные оси вращения.
Пределы дифферентовки ±20°
Оборудование для подводных работ
- Телеманипулятор с шестью степенями свободы. Длина "механической руки" - 90 см, грузоподъемность - 25 кг;
- колонка для отбора осадочных пород;
- опрокидывающиеся термометры;
- скальный бур, способный отбирать образцы длиной 10 и диаметром 2 см. Проходит экспериментальную проверку автоматический бур, который позволит получать образцы длиной 2 м. Он не войдет в состав оборудования аппарата, а будет лишь доставляться им на дно;
- гаки, захваты, долота которые можно закрепить в рабочем органе манипулятора.
Фотооборудование и освещение
-Семь внешних светильников;
- два 35-миллиметровых фотоаппарата;
- две кинокамеры, установленные на легком корпусе.
Навигационное оборудование
- Гидролокатор с непрерывным модулированным излучением типа CTFM; дальность действия - 500 м (при работе с транспондерами и пинджерами);
- гирокомпас;
- глубиномер;
-эхолот.
Погружения "Алвина" обеспечиваются 350-тонным носителем-катамараном "Лулу" (длина 33 м). Аппарат опускается на воду и поднимается на палубу катамарана при помощи платформы-подъемника. В зависимости от цели экспедиции на борт обеспечивающего судна берутся разные модули-контейнеры - ремонтная мастерская,океанологическая лаборатория, фотолаборатория и т. д. Экипаж катамарана состоит из 11 человек.
Напомним, что именно "Алвин", который обычно используется в сугубо мирных целях, нашел в 1966 г. на дне Средиземного моря атомную бомбу, затонувшую близ Паломареса.
"Алюминаут"
Основная особенность "Алюминаута" состоит в том, что его прочный корпус изготовлен из алюминиевого сплава.
Размеры
Длина-13,2 м; ширина - 2,7 м; высота - 4 м.
Экипаж
4 - 6 человек.
Прочный корпус
Толщина корпуса - 16,5 см; он представляет собой одиннадцать стянутых болтами цилиндрических секций, оканчивающихся двумя полусферами. Общая емкость балластных цистерн - 5 т.
Вес
78 т.
Скорость
От 2 до 3,8 узла.
Автономность
По запасам электроэнергии - 32 часа при скорости 3 узла; по запасам дыхательной смеси - 72 часа.
Рабочая глубина
Теоретически - 4000 м, но фактически аппарат никогда не погружался глубже 2500м.
Иллюминаторы
4 иллюминатора для наблюдения; осветительные прожекторы.
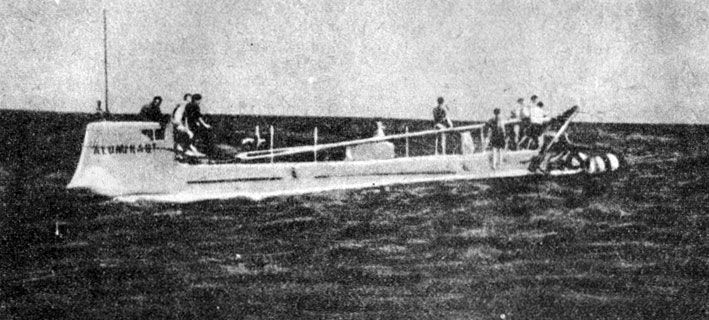
'Алюминаут' во время работ по спасению 'Алвина'
Источник энергии
Серебряно-цинковая аккумуляторная батарея, размещенная внутри прочного корпуса.
Двигатели
Два гребных электромотора для горизонтальных перемещений мощностью 5 л. с. каждый; помещены в контейнеры, заполненные маслом. Электромотор, обеспечивающий перемещение по вертикали, мощностью 5 л. с, также помещен в контейнер, заполненный маслом.
Оборудование для подводных работ
Два телеманипулятора со сменными инструментами.
Навигационное оборудование
Гидролокатор, гирокомпас, автопрокладчик курса и т.. д.
"DSRV"
"DSRV" (Deep Submergence Rescue Vehicle) - глубоководный обитаемый аппарат военно-морских сил США, предназначенный для спасения экипажей потерпевших аварию подводных лодок.
После катастрофы с "Трейдером" в апреле 1963 г., во время которой погибло 129 человек, командование ВМС США приняло решение создать спасательный аппарат, способный эвакуировать на поверхность экипаж подводной лодки,- если только авария произошла на такой глубине, на которой корпус подводной лодки может выдержать давление. Эта глубина засекречена, но тем не менее все знают, что она не превышает 1000 м.
Программой, рассчитанной на четыре года, предусматривалось строительство двенадцати "DSRV". На ее осуществление было выделено 36,5 миллиона долларов. К строительству приступили в 1964 г.
Однако создать подобный глубоководный аппарат оказалось столь непросто, что строительство растянулось на десять лет, а расходы составили не 36,5, а приблизительно 463 млн. долларов (т. е. они перекрыли проектную смету более чем на 1100%). Причем на эти средства удалось построить не двенадцать, а всего шесть аппаратов...
Такой крупный финансовый просчет весьма поучителен.
Первый аппарат этой серии был спущен на воду в 1970 г. и находится еще в стадии освоения. Мы не располагаем об этом аппарате достаточной информацией. И все же его технические данные и результаты ходовых испытаний дают основание сделать вывод, что "DSRV" представляет собой выдающееся достижение конструкторской мысли.
Его длина - 16 м, вес - 38 т. Он может транспортироваться на грузовом самолете типа "С-141". Именно это требование- возможность транспортировки аппарата воздухом,- предъявленное проектанту военно-морскими силами, и является одной из причин увеличения финансовых затрат.
Рабочая глубина "DSRV" - 1500 м, т. е. она в достаточной мере превышает предел прочности корпусов существующих атомных подводных лодок.
Прочный корпус аппарата состоит из трех сфер (сталь марки "НУ-140"), соединенных между собой сварными швами. Легкий корпус выполнен из полистирола, армированного стекловолокном. Главный винт имеет большой диаметр и защищен обтекателем. Кроме того, на корме по бортам находятся два винта малого диаметра. Подъем и погружение осуществляются с помощью вертикального винта. Источник энергии - серебряно-цинковые аккумуляторные батареи, размещенные внутри прочного корпуса. Они рассчитаны на 12 часов хода при скорости 3 узла; максимальная скорость - 5 узлов.
Автоматизированная комплексная навигационная система выдает обобщенные данные о местоположении и курсе аппарата на специальный индикатор.
Схема спасательных операций такова.
Самолет доставляет аппарат в район катастрофы. "DSRV" размещают на палубе атомной подводной лодки, которая погружается вместе с ним в точке, где произошла авария. Затем "DSRV" отделяется и идет на сближение с потерпевшей аварию лодкой, пеленгуя сигналы ее транспондеров или пинджеров. Последний, самый сложный маневр - стыковка с люком аварийной подводной лодки. Она выполняется при помощи автоматической или ручной системы управления. После стыковки люки подводной лодки и "DSRV" открываются, и спасательный аппарат готов принять на борт двадцать четыре человека. В случае необходимости операция повторяется несколько раз.
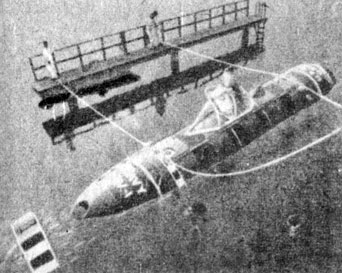
'DSRV'

'DSRV' можно транспортировать по воздуху
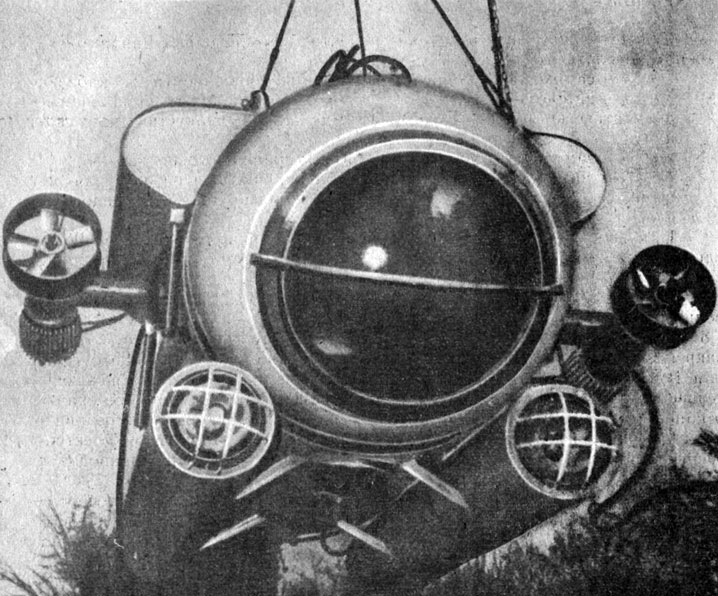
'Нерей'
"Нерей"
"Нерей" - самое последнее пополнение мирового океанологического подводного флота*; построен по заказу СОМЕХ. "Нерей" представляет собой одноместный аппарат, предназначенный для визуального наблюдения под водой. "Нерей" занимает особое место в многочисленном семействе подводных обитаемых аппаратов благодаря четырем характерным особенностям:
- аппарат относительно дешев;
- предназначен для узкоспециализированных задач (наблюдение за трубопроводами);
- неавтономен, энергию получает с поверхности по кабелю;
- имеет большой иллюминатор, обеспечивающий пилоту широкий сектор обзора.
* (Эта информация относится к 1972 г.- Прим. перев.)
Аппараты подобного типа весьма перспективны.
Мы не ставили перед собой задачу создать своего рода энциклопедию подводного флота и на этом закончим дальнейший перечень подводных обитаемых аппаратов. Мы описали самые характерные их типы, существующее на сегодняшний день.
Роботы
Существующие типы роботов - необитаемых подводных аппаратов - можно разделить на четыре группы:
- самоходные плавающие аппараты, управляемые по кабелю;
- автономные плавающие самоходные аппараты, управляемые автоматически по заданной программе или гидроакустическому каналу;
- самоходные донные аппараты, управляемые по кабелю;
- погружающиеся приборные блоки, предназначенные для решения специфических задач в заданной точке дна или придонных слоев.
К первой группе относятся американские аппараты типа "CURV", один из которых поднял со дна бомбу близ Паломареса; французские "Теленавт" (Институт нефти) и "ERIC" (ВМС).
"Теленавт" - самоходный аппарат, управляемый по кабелю с надводного судна. Его вес - 1т; длина - 4 м; ширина - 1,8 м; высота - 1,8 м. По существу, это конструкция из легчайшего сплава, на которой закреплены различные приборы, в том числе телеустановка, широкоугольная 16-миллиметровая кинокамера, и "механическая рука". Это исключительно маневренный аппарат - настоящий подводный вертолет. "Теленавт" оснащен двумя гидравлическими моторами, один из которых обеспечивает движение в горизонтальной плоскости, а другой - в вертикальной. Электроэнергия, поступающая на аппарат с поверхности по кабелю, приводит в действие электрогидравлические насосы.
Данные от магнитного компаса, эхолота и глубиномера "Теленавта" передаются на поверхность на пункт управления. Наблюдая за системой индикаторов на своем пульте, оператор в любой момент знает, что делает аппарат, каким курсом он следует и т. д.
Перед погружением "Теленавт" обычно проходит "вывеску на нулевую плавучесть". Постоянного балласта он не имеет, положительная плавучесть обеспечивается за счет пластмассовых шаров. Регулировка веса осуществляется перед самым погружением - добавляются или снимаются свинцовые пластины. Предельная рабочая глубина - 1000 м, но на практике аппарат использовался только на глубинах 100 - 150 м.
'Теленавт' - подводный необитаемый аппарат-робот Французского института нефти
'CURV' - необитаемый подводный аппарат-робот (ВМС США), тот самый аппарат, который поднял атомную бомбу со дна моря близ Паломареса

Японский подводный бульдозер
"ERIC" - более совершенный тип аппарата-робота. Его рабочая глубина - 500 м. Винты робота приводятся в движение электромоторами. Аппарат обладает большей грузоподъемностью, чем "Теленавт", что позволило установить на нем дополнительные приборы, в частности гидролокатор бокового обзора.
Преимущество аппаратов-роботов состоит в том, что они управляются по командам с надводного поста с такой же легкостью и предоставляют такие же возможности для наблюдения, как если бы оператор находился внутри аппарата (если считать, что понятие "внутри" для них существует!).
Подводные необитаемые аппараты позволяют расширить диапазон работ на морском дне. Как и подводные обитаемые аппараты, аппараты-роботы могут опускаться на несравненно большие глубины, чем водолаз. Они удобны в эксплуатации, однако область их применения ограничена: это поиск затонувших объектов (когда примерно известно их местоположение на дне), фото- и киносъемка, подъем со дна предметов весом до 50 кг.
Нам известен только один автономный (бескабельный) самоходный "мирный" робот - "Си Дроун". Мы не располагаем достаточной информацией о его технических данных и о его применении. Однако известно, что он предназначен для проведения научных исследований и снабжен различными датчиками для измерений на заданной глубине физических и биологических параметров.
Существует также довольно много "ползающих" самоходных донных телеуправляемых аппаратов.
Два подводных робота, снабженных разнообразным инструментом (разрабатываются фирмой 'Дженерал Электрик'). Предназначены для обслуживания оборудования устьев скважин
Одни из них используются для научных исследований, например "RUM" - своего рода подводный трактор, снабженный манипулятором и телевизионной системой (институт Скриппса в Калифорнии). Другие предназначены для эксплуатационных подводных работ - речь идет о подводных землечерпалках, способных вести земляные работы на небольших глубинах. Подводные аппараты этого типа, разработанные на основе выполняющих такие же работы наземных гусеничных машин, уже применяются в Японии; вполне вероятно, что они получат широкое распространение.
Аппараты-роботы, о которых мы рассказали, по сути дела,- телеуправляемые транспортные средства, т. е. носители, способные "видеть" и передавать "увиденное" на поверхность. За исключением подводных землечерпалок, каждый такой аппарат обычно способен выполнять различные виды работ.
Широкое развертывание эксплуатации ресурсов морского дна, в первую очередь нефти, а затем и минералов, вероятно, приведет к появлению новых "семейств" специализированных аппаратов-роботов, которые будут выполнять специфические задачи. Как и в случае с подводными обитаемыми аппаратами, развитие пойдет по пути все большего разнообразия и специализации используемых инструментов. Это будут скорее роботы-инструменты, чем роботы-носители...
Управляемые с поверхности по кабелю или по гидроакустическим телеметрическим каналам, специализированные аппараты-роботы смогут совершать самые различные действия: открывать или закрывать вентили трубопроводов, соединять или разъединять элементы различных устройств, включать и выключать, тянуть и толкать, опускать и поднимать при помощи гидравлических домкратов, погружаться на дно моря, чтобы брать пробы или фотографировать. Это будут не столь уж "разумные" роботы, но зато несколько простых "привычных" манипуляций, всегда одних и тех же, они выполнят четко и уверенно на любых глубинах.
Такие аппараты станут незаменимыми помощниками людей на грандиозных подводных промыслах будущего. Со временем роботы, может быть, и заменят на этих промыслах своих создателей, но еще долго, минимум десять - пятнадцать лет, они останутся лишь вспомогательным средством.
По крайней мере, мы так считаем.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'