5.4. Информационное обеспечение подводных работ
К этому виду обеспечения подводных работ относятся все способы снабжения технолога необходимой для него информацией: данными о навигационной обстановке, метеорологическими прогнозами, сведениями о состоянии оборудования, различных средств обеспечения, о запасах топлива, расходных материалов и т. п. К информационному обеспечению относятся средства подводного поиска, связи с надводными и подводными объектами, средства для фиксации результатов наблюдений за состоянием подводных сооружений, а также оборудование для обработки данных от многочисленных датчиков, контролирующих положение рабочих органов, систем, параметры технологического процесса. При реализации достаточно крупных проектов объем подобной "производственной" информации настолько велик, что для ее хранения, обработки и представления приходится прибегать к специализированным автоматическим системам управления на базе самых современных ЭВМ.
В навигационные задачи входят определение движения и координат надводных судов, управление перемещением подводных аппаратов, а также отдельных водолазов. Решение этих задач требует различной степени точности и характеризуется различными пространственными масштабами. Для обеспечения нужд подводной технологии используются все современные средства навигации, включая искусственные спутники, гидроакустические лаги и приборы инерциальной навигации.
Очень интересны и перспективны спутниковые системы. К их достоинствам относятся независимость от погодных условий, отсутствие ограничений по дальности, практически равная точность определений во всей рабочей зоне. Применительно к подводной технологии спутниковые системы позволяют надежно определять местонахождение судна и вести прокладку курса. Определение места судна в открытом море с использованием навигационных спутников отличается от других методов обсервации по небесным телам тем, что радиоаппаратура такого спутника передает в эфир точные данные о его положении в пространстве. Нахождение координат судна включает привязку системы судно-спутник, вычисление координат спутника в момент измерения навигационных параметров относительно заранее установленной системы отсчета и вычисление собственно координат судна. Например, действующая в настоящее время система "Транзит" позволяет определять положение неподвижного судна с точностью не менее 15 м. Система, представляющая собой глобальную всепогодную систему определения места судна по наблюдениям, выполненным при одном прохождении спутника в зоне видимости потребителя, состоит из трех основных комплексов: навигационных спутников, наземного обеспечения и бортового обеспечения потребителей. Каждый спутник этой системы выводится на круговую полярную орбиту высотой 1000 км, так что находящееся в северном полушарии судно может определять свое местоположение каждые 40 мин.
На практике для решения навигационных задач чаще всего используют комплексные системы, которые способны не только наблюдать за навигационной обстановкой, но и контролировать положение судна на трассе, управлять вспомогательными судами и механизмами. В этом отношении интересна навигационная система трубоукладочного судна "Викинг пайпер". В качестве основного элемента этой системы использован стандартный комплекс "Дэйт бридж" (фирма "Норконтрол"), основное предназначение которого - предупреждение столкновения судов в море, навигация и автоматическое судовождение. Наряду с радиолокатором в систему входят двухканальный приемоиндикатор спутниковой системы, доплеровский лаг, гирокомпас, приемники системы "Декка". Точность определения координат судна вблизи берега 5 м, в открытом море 15-20 м. Медленное перемещение судна по трассе постоянно контролируется доплеровским лагом, гирокомпасом и датчиком длины уложенных труб. Периодически ведется контроль положения по приемоиндикатору спутниковой системы. Все данные обрабатываются судовой ЭВМ и выдаются на экраны дисплеев. Перед началом укладки труб в качестве исходной информации в ЭВМ вводятся координаты реперных точек будущей трассы, ширина зоны следования трубоукладчика по трассе, радиусы изгиба трубопровода в местах изменения курса. В нужный момент эта информация выдается на приборы управления лебедками, обеспечивающими позиционирование. На экране дисплея, установленного на ходовом мостике, можно постоянно наблюдать намеченную трассу, путь следования по ней трубоукладчика, положение якорей ("Викинг пайпер" перемещается с помощью якорей, заводимых буксирными судами), маневры буксирных и вспомогательных судов.
Важная особенность системы - возможность ее использования для автоматической прокладки курса трубоукладчика по ранее полученным результатам изысканий. Для этого карты, записанные на магнитных носителях, с помощью идентичной системы навигации передаются на трубоукладчик и вводятся в память его ЭВМ. В процессе укладки все данные о реальном положении трубопровода фиксируются и передаются службам эксплуатации. Кассета с записями на магнитофонной ленте, полученными в процессе укладки с помощью комплекса "Дэйт бридж", может быть использована другими судами для точного выхода в требуемые места магистрали с целью устранения повреждений, инспекции, регламентных работ и т. д. [10].
Очень широко используются акустические методы. Наиболее эффективны системы, включающие донные маяки, размещенные в районе проведения работ. Такая система может быть построена на основе измерения времени распространения сигнала. Разрешающая способность этих систем значительно выше, чем у аналогичных надводных радиотехнических средств вследствие того, что скорость распространения звука в воде примерно в 200 000 раз меньше скорости распространения радиоволн в воздухе. Ограничение точности акустических систем с маяками вызвано тремя причинами. Во-первых, точность установки самих маяков не может быть выполнена выше, чем это позволяют радиотехнические средства судна обеспечения (в районах действия радиодальномерных средств до ±2 м). Во-вторых, при достаточно больших измерительных базах становится существенной рефракция звуковых волн в слоях с различными акустическими свойствами, отклоняющая звуковой луч от прямолинейного распространения. Правда, в районе с известным распределением звукопроводящих слоев эти погрешности могут быть устранены введением расчетных поправок. Наконец, сама скорость звука в различных слоях морской воды не всегда известна с достаточной точностью.
Маяковые акустические системы могут быть реализованы несколькими способами [87]. Хороших результатов достигают, применяя донные импульсные повторители-ответчики (транспондеры). В этом случае подводный аппарат (надводное судно) излучает звуковой импульс, принимаемый тремя ответчиками, которые выдают собственные сигналы строго определенной длительности. По разности времени прихода этих сигналов бортовое вычислительное устройство определяет положение аппарата в заданной системе координат. Для большей надежности вертикальную координату можно ввести в вычислитель независимым образом от датчика глубины. С помощью трех ответчиков при радиусе приема 12 км обслуживается район площадью до 500 км2 (рис. 5.7).
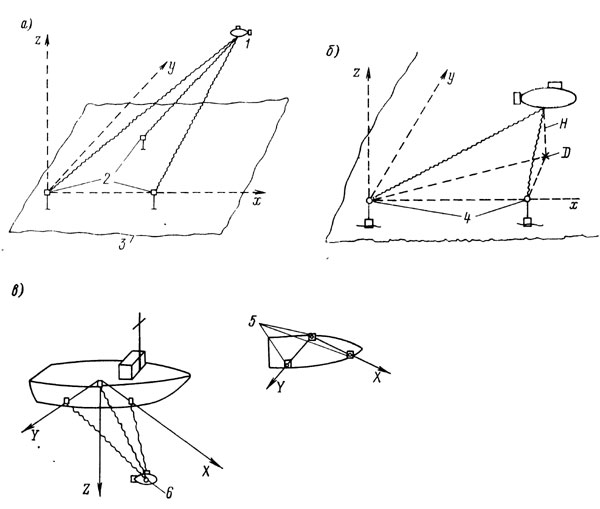
Рис. 5.7. Ориентация подводного аппарата: а - по трем донным приемникам - ответчикам (система с длинной базой); б - по двум маякам и датчику расстояния до дна; в - по собственному маяку подводного аппарата с помощью трех приемников, установленных на обеспечивающем судне (система с короткой базой). 1 - подводный аппарат; 2 - приемник-ответчик; 3 - дно; 4 - донные маяки; 5 - приемники судна обеспечения; 6 - маяк на подводном аппарате, Н - расстояние до дна; D - положение аппарата на плоскости ху
Что касается навигационного обеспечения автономных подводных аппаратов, то здесь наиболее перспективными в настоящее время считаются импульсно-доплеровские системы, позволяющие определять положение относительно какой-либо начальной точки отсчета. В таких системах начальные координаты реперных точек вычисляются обычным импульсно-дальномерным способом, а смещение относительно этих точек - интегрированием скорости смещения, определяемой по изменению доплеровской частоты (увеличивающейся или уменьшающейся в зависимости от того, удаляется или приближается объект к маяку).
Разрабатываются и другие типы акустических систем, более простые с точки зрения эксплуатации в ходе выполнения технологических операций в толще воды и на дне. Так, несколькими японскими фирмами создан совместный проект системы, не требующей для работы специальной подготовки, в частности точной установки маяков [97]. Система, включающая несколько ультразвуковых датчиков, блок управления со встроенной специализированной ЭВМ, двухкоординатный самописец и индикаторное устройство, может эксплуатироваться в нескольких вариантах. Один из них, предназначенный для позиционирования подводного бульдозера или любого донного перемещающегося устройства, снабжен двумя ретрансляторами, которые опускаются на грунт на границах рабочей площадки (расстояние от 50 до 400 м), и кабелем связаны с судном обеспечения. Движущийся объект оснащается ультразвуковым маяком. В определенный момент времени один из ретрансляторов излучает, а второй принимает базовый импульс; в следующий момент оба ретранслятора принимают импульс, вырабатываемый маяком объекта, что позволяет определить его расстояние до каждого из ретрансляторов. Ультразвуковые посылки маяка следуют с частотой 5 Гц, поэтому на самописце или индикаторе можно практически непрерывно контролировать положение объекта.
В другом варианте система работает по принципу короткой измерительной базы: три приемопередатчика крепят к днищу позиционируемого судна, подводного аппарата или перемещающегося в толще воды робота в вершинах равностороннего треугольника. В определенной точке на дне устанавливается ретранслятор. Цикл определения координат относительно ретранслятора начинается с подачи одним из приемопередатчиков опорного импульса. В ответ повторитель вырабатывает свой импульс с другой частотой заполнения. Последний воспринимается всеми тремя приемопередатчиками, что позволяет бортовому вычислительному устройству непрерывно рассчитывать положение объекта в трехмерной системе координат. С помощью этой системы можно наблюдать за положением плавающего или перемещающегося по дну водолаза. Описанная система позиционирования снабжена устройством селекции сигналов с автоматической регулировкой усиления, благодаря чему информационные сигналы принимаются в условиях шумов, создаваемых подводными агрегатами.
Приборная реализация систем информационного обеспечения современного рабочего обитаемого подводного аппарата достаточно сложна. Она включает в обязательном порядке устройства гидроакустической связи, эхолоты типа "верх-низ", различные гидролокаторы, обеспечивающие как панорамный, так и секторный обзор. Сюда входят гидроакустические маяки и приемоответчики, доплеровские лаги, специальные приборы подводного поиска (локаторы бокового обзора, магнитометры, металлоискатели и т. д.). Достаточно сказать, что стоимость электронных средств оснащения аппарата широкого назначения составляет почти половину его полной стоимости.
Информационное обеспечение водолаза-технолога осуществить легче. Для работы под водой ему необходимы надежная связь и возможность ориентироваться. Основные требования к используемой при этом аппаратуре - малые габариты и масса, простота и надежность эксплуатации, достаточные дальность и срок действия. Для ориентации сейчас широко используются индивидуальные ультразвуковые средства подводного поиска. С этой целью подводные объекты маркируют акустическими маяками, а водолаза снабжают пассивным локатором с достаточно узкой диаграммой направленности приемного гидрофона, сигнал которого либо подают на головные телефоны, либо на световой индикатор. Если обозначенных на дне объектов (в пределах дальности распространения ультразвукового сигнала) несколько, то сигнал модулируют каким-нибудь простым и хорошо распознаваемым кодом. Особую ценность ультразвуковая разметка имеет при поиске уединенных и редко посещаемых объектов. К недостаткам подобных систем можно отнести наличие довольно сложных электронных приборов, требующих обслуживания, в частности смены источников питания. До получения надежного пеленга водолаз должен затратить некоторое время. Кроме того, если водолаз находится на грунте и ему надо перейти к следующему объекту, то для поиска приходится сильно привсплывать, чтобы избавиться от экранирующего действия препятствий и помех, связанных с отражением от дна.
Существует несколько типов такой аппаратуры. Все они дают только направление на источник ультразвука. Чтобы полностью решить задачу ориентации, надо создать аппаратуру, которая позволяла бы водолазу получать представление о своих координатах. Это гораздо труднее, хотя речь не идет о точных значениях. Попытки в этой области делаются. Не так давно американскими исследователями было запатентовано устройство для ориентации подводного пловца относительно нескольких подводных акустических маркеров. Принцип действия устройства основан на последовательном приеме непрерывного ультразвукового сигнала двумя парами приемников, расположенных друг от друга на определенном расстоянии. Каждая пара предназначена для ориентации в одной из плоскостей и может использоваться самостоятельно. Электронная схема устройства позволяет для каждой пары приемников получить две симметричные диаграммы направленности, образующие равносигнальные направления вдоль нормалей к серединам измерительных баз. Сигнал с выхода устройства подается на головные телефоны. Он модулируется таким образом, что при изменении на правления принимаемый водолазом код изменяется. Для работы с одним маркером достаточно использовать одну пару преобразователей. Чтобы получить представление о положении в трех плоскостях, систему делают трехканальной с электрической перестройкой преобразователей на частоту соответствующего маркера. Водолаз последовательно определяет свое положение в трех плоскостях и делает заключение о своем местоположении [44].
Радикальным решением проблемы ориентации водолаза будет, вероятно, такое, при котором его оснащение приборами сведется к минимуму, все вычислительные и подобные им операции будут выполняться внешним устройством, а водолаза в толще воды и вблизи дна поведет оператор или автомат подобно тому, как это делается в авиации. Резервные автономные средства в такой ситуации понадобятся водолазу только на случай выхода системы из строя.
До сих пор речь шла о пассивных методах водолазного поиска и ориентации, однако существуют и активные средства: различного типа водолазные локаторы, металлоискатели и т. д.
Основные параметры локаторов - разрешение по дальности и по углу - определяются характеристиками акустического преобразователя. От них же зависит масса и габариты прибора. Мощность генератора локатора ограничивается соображениями безопасности и емкостью источников питания. Эти параметры не связаны со способом представления результатов, определяющих информационные возможности прибора. В частности, по структуре сигнала на экране индикатора опытный водолаз может определить не только направление, дальность, угловые размеры преграды, но и "почувствовать" ее фактуру, опознать.
Однако распознавание объектов под водой - это уже другая, самостоятельная информационная задача. Для ее решения естественно привлечь звуковидение. Предмет, находящийся в непрозрачной для глаза среде, облучают ультразвуком. Звуковые лучи отражаются от него, и часть их попадает на звуковой объектив, формирующий в своей фокальной плоскости "изображение" - распределение в пространстве поля давления, в определенном масштабе воспроизводящего облучаемый предмет. Это поле давления делают видимым при помощи электронно-акустического преобразователя (ЭАП), приемным элементом которого служит пьезоэлектрическая пластина. Чувствительность современных ЭАП (не менее 10~9 Вт/см2) приближается к аналогичным характеристикам глаза и уха. Их разрешение зависит от частоты облучающего ультразвука. Для подводных исследований с участием водолаза подходит диапазон 5-10 МГц. В этом диапазоне принципиально можно создать аппаратуру, которая позволила бы водолазу просматривать пространство глубиной до нескольких метров. При таких частотах линейное разрешение составляет величину порядка 1 мм.
В настоящее время гидроакустики многих стран работают над созданием акустических голографических систем подводного видения. Интересные результаты получены японскими разработчиками, создавшими и испытавшими в 1977 г. макет подобной системы. Система работает на глубине до 100 м, ее дальность действия от 2 до 100 м, угол зрения 40х40° при угловом разрешении 0,4°. Система работает на частоте 200 кГц при мощности излучения 200 Вт. Излучателем служит антенная решетка из 16 пьезокерамических элементов (матрица 4x4), приемная матрица содержит 32x32 элемента. Ее антенна, питаемая 16-канальным генератором, управляемым ЭВМ, последовательно облучает участки просматриваемого пространства. Поступающие с приемной матрицы сигналы усиливаются 1024-канальным усилителем, преобразуются в двоичный код и вводятся в память ЭВМ с сохранением временного признака. Изображение ЭВМ воспроизводит за 2 с. При этом за счет цифровой обработки достигается устойчивое качество изображения, его фильтрация от посторонних помех. Импульсный режим работы позволяет получить данные о дистанции до предмета и вследствие временной селекции снизить влияние объемной реверберации звуковых волн. Сравнение описанной системы визуализации с обычным наблюдением подтвердило ее эффективность, особенно в мутной воде. Так, если дальность обычного наблюдения не превышала 1 м, то гидроакустическая система давала возможность различать крупные детали предмета на расстоянии 100 м при десятикратном увеличении замутненности*.
* (См. "Japan Electronic Engineering", 1977, IX, № 129, с 28-31.)
Голографические принципы могут быть использованы и при наблюдении объектов, скрытых от наблюдателя толщей грунта. Такая потребность возникает, например, при обследовании глубоководных трубопроводов. Для этих целей фирмой "Голосоникс" разработана система, включающая необитаемый подводный аппарат, который несет плоскую многоэлементную акустическую антенну размером 3х6 м, собранную из обычных акустических преобразователей, работающих на частоте 10-20 кГц. Эта антенная решетка предназначена для определения местоположения трубопровода (диаметром 0,25-0,9 м), дефектов в нем и в его облицовке. Чтобы повысить разрешение системы, вдоль центральной линии антенной решетки был установлен ряд высокоразрешающих преобразователей, работающих на частоте 200 кГц и обеспечивающих определение линейных размеров повреждения. Подводный аппарат снабжен гидролокаторами, которые обнаруживают препятствия и позволяют удерживать аппарат на определенном расстоянии от дна (рис. 5.8). С помощью индикаторного устройства, размещенного на борту судна обеспечения и связанного с подводным аппаратом кабелем, можно получить изображение трубопровода в реальном масштабе времени [95].
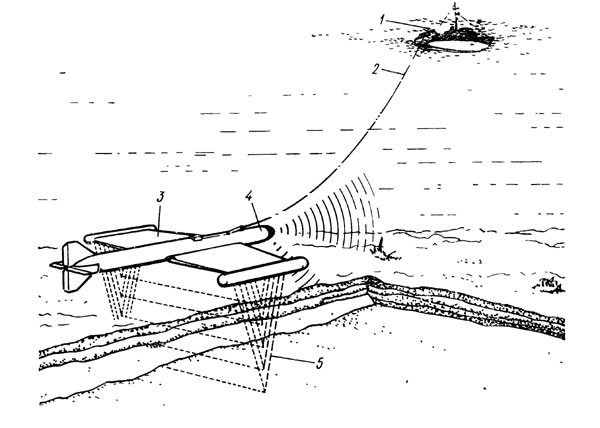
Рис. 5.8. Схема использования акустической голографической системы для обследования подводных трубопроводов. 1 - судно обеспечения; 2 - кабель-трос; 3 - подводный аппарат, несущий акустическую систему; 4 - гидролокатор и высотомер; 5 - направление облучения трубопровода ультразвуком
Следует отметить, что арсенал средств расширения возможностей зрения под водой пока еще беден. Водолаз-исследователь может использовать осветительные приборы - подводные фонари "заливающего света", индивидуальные осветители направленного действия. В перспективе - освещение участков дна лазерами. Но любая подсветка хороша в достаточно прозрачной воде. В воде с большим количеством взвеси увеличение освещенности часто приводит к обратному эффекту: из-за сильного рассеяния света фоновое излучение настолько возрастает, что рассматриваемый объект исчезает из поля зрения. Некоторую помощь здесь могут оказать поляризационные светофильтры. Нанесенные на стекло маски, они ослабляют световой поток, принимаемый глазом, но частично убирают фон. Еще лучший результат дает сочетание поляризационного светофильтра с освещением поляризованным же светом.
Прогресс электроники позволяет надеяться, что водолазы в ближайшее время получат специальные оптические системы обзора, увеличивающие дальность зрения в мутной воде. Сообщения о создании подобных систем уже появились в печати. Они включают в качестве источника света импульсный или непрерывно генерирующий лазер, а в качестве приемника изображения - высокочувствительный электронно-оптический преобразователь. Для подавления сигнала за пределами требуемой дальности наблюдения используют метод "стробирования по дальности", реализуемый за счет введения в систему питания преобразователя специального временного селектора. Система позволяет не только видеть значительно дальше, но и определять расстояние до наблюдаемого предмета. Подобный метод временной селекции применяется и в гидролокации. Основу такой схемы составляет лазер с малой угловой расходимостью луча, благодаря чему на объекте высвечивается площадка диаметром не более 2 см на расстоянии 10 м. Сканирование луча в двух плоскостях осуществляется с помощью двух вращающихся зеркал. Синхронизация сканирования луча и чувствительной зоны приемной телевизионной трубки дает возможность наблюдать излучение, приходящее только от освещаемой в данный момент точки объекта. Таким образом, достигается защита от рассеянного в воде света.
Несколько слов о ставших уже традиционными методах регистрации результатов подводных наблюдений - фото- и киносъемке, телерепортаже. Эти методы прочно вошли в практику работ под водой. Они позволяют быстро собрать требуемые сведения о нужном объекте, максимально сократить время работы под водой за счет детального анализа на поверхности полученных изображений.
Реализованы два пути создания аппаратуры для подводной съемки: изготовление боксов для серийных камер и разработка специальных герметичных камер. Нашей промышленностью были освоены серийные боксы типа УКП для камер "Ленинград", "Зоркий", ФЭД, типа КПФ для камеры "Старт", типа КПФ-1 для камеры "Зенит". Умельцы быстро научились переоборудовать эти боксы практически под любые фотоаппараты, встраивать в них блоки питания для электронных ламп-вспышек, а сами лампы монтировать на кронштейнах. Качественный скачок в развитии техники для подводной съемки произошел после создания под руководством М. М. Русинова серии специальных короткофокусных подводных объективов типа "Гидроруссар". Эти объективы практически не дают искажений, свойственных их сухопутным "собратьям", резко "рисуют" изображение предмета с расстояния 50 см до бесконечности.
Перспективна для подводных съемок отечественная камера "Салют" с широкоугольным короткофокусным объективом "Мир-26". Широкая пленка (размер кадра 6x6 см), точная наводка на резкость по матовому стеклу, быстросъемная кассета со счетчиком кадров - все это дает возможность делать снимки, по качеству не уступающие тем, которые получаются с помощью известной зарубежной камеры "Роллей-флекс" (вместе с фотобоксом - "Роллей-марип").
Нельзя не упомянуть и о популярной шведской камере "Хассельблат" с боксом того же наименования. Все виды этой камеры, выпускаемой в Гетеборге, позволяют получать прекрасные подводные снимки, однако стоимость камеры очень высока, что еще раз выгодно отличает отечественный "Салют". К сожалению, боксы для "Салюта" серийно не выпускаются, однако чертежи их описаны в литературе.
У подводников во всем мире большим успехом пользуются фотокамеры, разработанные специально для подводных съемок. Первая среди них - созданная под руководством Ж.-И. Кусто камера "Калипсо-фото". Она имеет кадр 24x36 мм, оснащена объективом с фокусным расстоянием 35 мм, диапазон ее выдержек - от 1/30 до 1/1000 с, а примерные размеры - 130х90х35 мм. В воде камера обладает небольшой положительной плавучестью и почти не сковывает действия водолаза. Не меньшей популярностью пользуется выпущенная в Японии по французскому патенту камера "Никонос", являющаяся почти полным повторением камеры "Калипсо-фото". Интересно отметить, что эта камера рекламировалась как всепогодная, позволяющая фотографировать в проливной дождь. Это определило для нее обширный рынок сбыта. Одна из последних разработок - камера "Никонос-2" - предназначена исключительно для подводных съемок. Она оснащена сверхширокоугольным объективом UW-Nikkor с фокусным расстоянием 15 мм и углом зрения в подводном положении 94°.
Из широкопленочных камер, предназначенных специально для выполнения технических фоторабот, специалисты выделяют уже упоминавшуюся камеру РС-770 (более поздняя модель - РС-775), разработанную фирмой "Хайдро продактс" совместно с лабораторией электроники ВМС США. Важное достоинство этой камеры - возможность с ее помощью отснять 30 м пленки, сделав без перезарядки до 400 кадров размером 57x57 мм. В свое время камера РС-770 получила достаточно высокую оценку акванавтов подводной лаборатории "Силаб-2".
Одна из последних разработок в этой области - камера для технических съемок BDC-370. С ее помощью можно сделать 800 кадров на обычной 35 мм пленке и 1600 кадров на пленке с тонкой подложкой. На каждом кадре фиксируются его номер, дата и время съемки. Камера оснащена объективами "Никонос" с фокусными расстояниями 28, 35-и 80 мм, имеет выдержки от 1/5 до 1/125 с, а изменение относительного отверстия - от 1:3,5 до 1:22. Дистанция съемки - от 60 см, все управление камерой электрифицировано.
Серийные боксы для киносъемочных аппаратов выпускались отечественной промышленностью только для узкопленочных любительских камер "Спорт" и "Кварц" ("Кварц-2"). Это известные ПКБ-2 и "Нептун". Для технических и научных съемок наиболее подходят аппараты, работающие на пленке 16 и 35 мм, оснащенные электроприводом. Разработан ряд конструкций боксов для таких аппаратов. А. С. Массарским, например, описаны боксы для камер "Киев-16С-2", "Адмира-электрик", "Конвас-автомат". Эти боксы изготовлены в нескольких экземплярах, известны их модификации. Сейчас любая съемочная группа, приступающая к подводным работам, вынуждена первым делом позаботиться об изготовлении подходящего бокса. Возможный выход из создавшегося положения - выпуск специализированной подводной камеры. Первая отечественная конструкция подобного рода принадлежит А. С. Массарскому. Созданный им герметичный корпус для камеры типа "Аврора-12" выдержал давление на глубине 82 м.
При выполнении технических и исследовательских работ под водой киносъемка по своим возможностям уступает более оперативному телерепортажу. Кроме телерепортажа техника кабельного телевидения широко применяется для наблюдения за водолазами, за работой различных устройств, которые в любой момент могут потребовать человеческого вмешательства, для предварительного осмотра участка дна, куда должен спуститься водолаз. Особое применение нашли телевизионные устройства при создании телевизоров для различной съемочной аппаратуры. Важное достоинство методов телевидения состоит в том, что в процессе преобразования сигнала появляется возможность сильно повысить контраст изображения на телеэкране по сравнению с контрастом наблюдаемого объекта. Известно, что так называемая идеальная телевизионная система благодаря этому свойству имеет различимый порог контраста в сто раз меньший, чем глаз человека. Это дает возможность повысить дальность видимости в морской воде примерно в два раза по сравнению с обычным визуальным наблюдением.
Современная подводная телекамера - небольшой 250-миллиметровый цилиндр массой около 2 кг и диаметром примерно 50 мм. Камера может быть установлена прямо на водолазном шлеме и отъюстирована так, чтобы поля зрения надводного оператора и водолаза совпадали. Камера соединяется кабелем с монитором на борту судна обеспечения, в подводном убежище или на платформе. По кабелю подаются видеосигнал, сигналы управления, питание, комментарии водолаза. В открытом море и в прибрежных водах, не замутненных выносами, современные телекамеры могут работать без специального освещения практически во всем диапазоне погружений с аквалангом. Освещенность при этом меняется от нескольких тысяч лк у поверхности до единиц лк на глубине около 100 м. Если естественного освещения недостаточно или необходимо стабилизировать освещенность, изменяющуюся из-за перемещения водолаза, применяют подводные светильники. Обычно для подсветки достаточно двух ламп мощностью 100-150 Вт. При большей мощности дальность наблюдения, как и при фотографировании, уменьшается из-за дымки обратного рассеяния. Используют и "бестеневые" осветители, включающие большее число ламп при той же общей мощности.
Если работу надо вести в мутной воде, где видимость близка к нулю, никакие ухищрения с искусственным освещением обычно не помогают. Здесь для наблюдений используют контейнеры с чистой водой, через которые можно наблюдать небольшие предметы, состояние поверхностей оборудования и опор. Для контроля больших объемов в мутной воде с помощью оптических методов не так давно американские специалисты предложили специальную систему очистки и подачи прозрачной воды. Для стационарных наблюдательных телевизионных систем это хотя и дорогостоящий, но перспективный метод. Возможно, что с развитием звуковидения и акустической голографии удастся создать более подходящие системы наблюдения за работающими под водой механизмами, но элемент телевизионной аппаратуры в них будет присутствовать непременно.
Телевизионный монитор, расположенный в пункте управления работами, включает пульт управления одной или несколькими камерами, видеоконтрольное устройство, видеомагнитофон. В эту же систему подключены переговорные устройства, что дает возможность синхронно записывать на звуковой дорожке речь водолаза и реплики оператора. Использование видеозаписи не только расширяет возможности памяти, но и существенным образом изменяет саму динамику работы под водой. Если в случае систем без записи изображения оператор и специалисты на поверхности должны были успевать просматривать быстро чередующиеся кадры изображения, все время дергая водолаза просьбами замедлить осмотр, то теперь, используя стоп-кадр, непосредственный осмотр и детальное изучение повреждений можно разделить.
Такие важные достоинства телевизионной аппаратуры как оперативность обработки информации, возможность автоматизации и постоянного видеоконтроля за действиями людей и оборудования, принципиально высокое качество записи - все это делает ее применение при организации подводных работ не только выгодным, но и просто необходимым.
Интересные возможности открывает прямой телерепортаж. Уже более 10 лет используются для этой цели телекамеры в практике обследования транспортных сооружений, опор мостов, кладки молов, прокладки трубопроводов. Для этих целей специалистами в нашей стране еще в 1965 г. была разработана надежная транспортабельная аппаратура. Создание портативных телекамер расширило возможности телерепортажа. Дж. Кении описывает в качестве примера использования телерепортажа метод освидетельствования морских буровых платформ, введенный американским бюро судоходства [23]. Теперь, не останавливая бурения, можно осмотреть подводные части платформы, записать результат на магнитную ленту и предъявить ее в органы надзора для заключения о пригодности к дальнейшей эксплуатации.
По мере развития техники телевидения его техническое применение становится все более привлекательным. Уже сейчас это электронное зрение превосходит зрение человека в 10 - 100 раз, а фотографический процесс - в 100 раз. В перспективе создание малогабаритных твердотельных датчиков изображения на базе так называемых самосканирующихся матриц, внедрение которых в корне изменит процесс формирования изображения, чрезвычайно упростит передающую аппаратуру. Такие матрицы не требуют сложной системы питания, стабильны во времени, их размеры таковы, что герметичный передатчик с объективом и усилителем умещается на ладони.
У телевидения есть и другие возможности развития. До сих пор речь шла об обычном телевидении, но ведь разрабатываются и системы объемного телевидения. Такие системы крайне нужны операторам подводных манипуляторов, их опытные образцы уже существуют. Ведутся разработки и телевизионных голографических систем. Принцип их действия состоит в том, что голографическое изображение формируется не на фотослое, а на катоде передающей трубки. Затем голограмма воспроизводится на экране приемника - специальной проекционной трубки, освещается лучом лазера и восстанавливается в объемное изображение предмета. Реализация возможности создания таких систем уже доказана экспериментально, правда пока только для ограниченного числа ракурсов статического изображения. Для передачи динамики пока еще нет способа передачи голограмм с требуемой скоростью. Однако вполне возможно, что голографическое телевидение найдет применение в практике подводных работ.
Как видит читатель, даже столь поверхностное описание существующих и разрабатываемых в настоящее время средств информационного обеспечения подводных работ показывает их довольно широкие возможности. Очевидно, что развитие физических представлений о природе подводной среды, темпы развития электроники, широкое использование вычислительной техники - все это позволит со временем создать единые информационно-управляющие системы "человек - подводная среда". Они будут способны решать не только локальные задачи наблюдения за несколькими подводными аппаратами или водолазами, но и полностью возьмут на себя обработку тех огромных массивов информации, с которыми приходится иметь дело при широком развертывании подводных работ в океане. Уже сегодня в арсенале электроники есть все необходимые элементы для создания таких систем.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'