Проектирование аппарата
Водоизмещение должно быть небольшим. - Какой будет форма корпуса! - Экипаж. - Командир аппарата будет сидеть, подводный наблюдатель - лежать. - Семь часов под водой - много это или мало! - Движительные комплексы. - Аккумуляторные батареи и автономность. - На случай аварии.
Итак, назначение аппарата известно, можно приступать непосредственно к его проектированию.
Перед началом работы мы рассмотрели все аналогичные зарубежные подводные аппараты, их конструктивные схемы, особенности эксплуатации и аварии. (Основные характеристики некоторых зарубежных шельфовых аппаратов приведены в таблице.)
В первую очередь необходимо было определить способ доставки аппарата в район проведения исследований.
За рубежом специальных судов-носителей для подводных аппаратов почти не строили, а приспосабливали старые, корабли типа тральщиков, сторожевиков, понтоны и баржи. Таким было знаменитое "Калипсо", переоборудованное из тральщика для проведения работ с аппаратом "Дениза". Таким было судно "Берч-тайд", переоборудованное американцами в 1963-1964 гг. из 41-метрового транспортного судна для той же "Денизы".
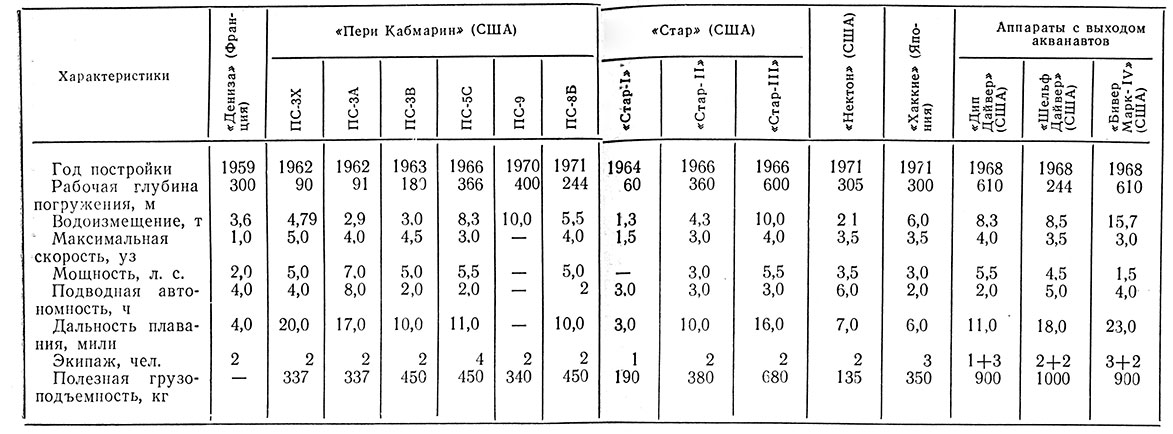
Таблица основных характеристик зарубежных шельфовых аппаратов
Зарубежные суда-носители небольшие по размерам. Это, в известной степени, можно объяснить тем, что исследования с помощью подводных аппаратов проводились в основном в прибрежной зоне, вблизи портов, куда всегда можно зайти для пополнения запасов и отдыха команды.
Предполагалось, что районы работ нашего аппарата будут значительно удалены от места базирования, поэтому судно-носитель должно было обладать хорошими мореходными качествами и иметь большую автономность плавания. От крупнотоннажных рыболовных траулеров типа БМРТ и подобных им судов пришлось отказаться, так как их эксплуатация требует больших финансовых затрат.
После тщательного анализа было выбрано судно типа СРТМ водоизмещением 1000-1200 т с кормовой схемой траления. Специальному конструкторскому бюро поручили разработать проект его переоборудования для базирования подводного аппарата. В соответствии с размерами судна-носителя была выбрана одна из основных характеристик аппарата - водоизмещение. Это решение отвечало желаниям ученых получить небольшой по размерам, маневренный, простой в обслуживании подводный аппарат. Глубина погружения была назначена 300 м.
Прежде всего следовало решить, какой формы будет прочный корпус. Корпуса большинства зарубежных аппаратов, предназначенных для работы на глубинах до 400-500 м, имеют форму цилиндров. Лишь корпус "Денизы" выполнен в виде сплющенной сферы, за что аппарат получил свое второе название "Ныряющее блюдце".
Тщательно обдумав все возможные варианты, решили корпус делать в виде цилиндра со сферическими концевыми переборками. Это наиболее подходящая форма корпуса аппарата с такой глубиной погружения.
Перед проектировщиками была поставлена трудная задача - им предстояло при жестком ограничении водоизмещения и малом диаметре прочного корпуса разместить все необходимое оборудование. Специального малогабаритного оборудования наша промышленность в то время не выпускала, а разработка и изготовление его были связаны с дополнительными материальными затратами, повышением стоимости аппарата и увеличением сроков постройки. Поэтому было решено обойтись по мере возможности существующим оборудованием и разрабатывать только то, без чего аппарат просто не мог существовать, в первую очередь движительные комплексы и водяной насос.
Отобрав необходимое на первый взгляд оборудование и предварительно проработав его размещение в корпусе, установили, что водоизмещение аппарата почти в два раза больше заданного. Пришлось пересмотреть перечень оборудования и кое от чего отказаться. Придав прочному корпусу веретенообразную форму, т. е. заменив цилиндрические обечайки приблизительно с середины корпуса до кормы на конические, получили корпус нужных размеров.
В носовой полусферической переборке решено было сделать шесть иллюминаторов таким образом, чтобы в три нижних подводный наблюдатель мог смотреть, находясь в лежачем положении, а в три верхних- в сидячем. Из основного, переднего, иллюминатора можно смотреть вперед и вниз, что позволяет вовремя увидеть возможные подводные препятствия перед аппаратом и одновременно хорошо рассмотреть грунт с его обитателями.
Экипаж аппарата ТИНРО-2, как уже говорилось, должен был состоять из двух человек: командира аппарата и исследователя. Командир аппарата отвечает за все техническое обеспечение погружения, контролирует параметры работы всех систем и механизмов и осуществляет операции по отходу от судна-носителя, погружению, выходу к месту работы и возвращению на судно. Подводный исследователь выполняет научную программу, наблюдает, фотографирует, занимается киносъемкой, управляет аппаратом у грунта и записывает свои наблюдения на магнитофон.
Из-за малого диаметра прочного корпуса (всего чуть больше 1,5 м) расположить обоих членов экипажа рядом друг с другом в носовой части аппарата было невозможно. Поэтому место для командира аппарата отвели в средней части, прямо под входным люком. Для обеспечения обзора в комингсе входного люка решено было сделать еще три иллюминатора, один из которых направлен вперед и два - по бортам. В надводном положении эти иллюминаторы должны были находиться над водой и облегчать командиру аппарата проводить совместное маневрирование с судном-носителем. Таким образом, всего на аппарате предполагалось девять иллюминаторов.
Для того чтобы рабочие места подводного исследователя и командира аппарата были максимально просторными, все оборудование и механизмы, которые не нужны для непосредственного управления аппаратом, расположили в кормовой части корпуса и отделили ее звукоизолирующей переборкой, чтобы шум от работы этого оборудования не мешал экипажу. В результате образовалось два отсека: носовой - обитаемый и кормовой - необитаемый.
В носовом обитаемом отсеке были сосредоточены все органы управления движением аппарата и приборы контроля. Поэтому при нормальных условиях работы аппарата во время его автономного плавания заходить в кормовой необитаемый отсек гидронавтам не было нужды. Такая компоновка позволяла экипажу не отвлекаться от выполнения основной задачи погружения.
Отличием подводных аппаратов от надводных судов является равенство веса аппарата весу воды, вытесненной полностью погруженным в воду аппаратом. При соблюдении этого условия спущенный на воду подводный аппарат должен погрузиться под поверхность воды и остаться в "безразличном" равновесии - не погружаться глубже и не всплывать на поверхность, т. е. иметь нулевую плавучесть. Дальнейшее погружение может осуществляться либо за счет включения вертикальных винтов, либо за счет приема воды из-за борта в специальную цистерну.
На некоторых зарубежных подводных аппаратах в целях экономии энергии аккумуляторных батарей для погружения и всплытия используют два специальных груза. Аппарат с грузами имеет отрицательную плавучесть и сразу после спуска на воду погружается до грунта. После сброса первого груза аппарат приобретает почти нулевую плавучесть, и дальнейшее изменение глубины происходит в результате работы вертикальных винтов. Для всплытия на поверхность сбрасывается второй груз. На ТИНРО-2 для погружения и всплытия служат вертикальные винты.
Для того чтобы входной люк с иллюминаторами после всплытия аппарата выходил из воды, снаружи прочного корпуса по бортам размещены две балластные цистерны. Если они заполнены водой, то аппарат имеет приблизительно нулевую плавучесть и находится целиком под поверхностью воды. При их продувании сжатым воздухом аппарат всплывает в надводное положение.
Такова общая схема аппарата ТИНРО-2, принятая на самых ранних стадиях его проектирования.
Теперь предстояло решить, сколько времени подводный аппарат может находиться под водой? От этого зависели емкость аккумуляторных батарей и их количество. С одной стороны, время пребывания под водой должно быть наибольшим. Это позволит экипажу обследовать большую площадь морского дна, сделать больше фотоснимков, получить больше информации, с другой - чрезмерно длительное время пребывания людей в ограниченном замкнутом пространстве вызывает физическое и моральное напряжение, приводит к быстрой утомляемости, снижению внимательности, а следовательно, к потенциальной возможности совершения ошибок в управлении аппаратом. Предельно возможное время пребывания экипажа в зарубежных подводных аппаратах аналогичного класса не превышает 6-7 часов. В соответствии с этим устанавливается и рабочий день гидронавтов.
Для длительного пребывания гидронавтов под водой создаются специальные подводные самоходные и несамоходные большие лаборатории, оборудованные каютами со спальными местами, камбузом и всеми необходимыми системами жизнеобеспечения.
С увеличением рабочей глубины погружения аппарата возрастает время, необходимое для его погружения до грунта и всплытия на поверхность, в течение которого экипаж, как правило, не занимается сбором информации. Поэтому для эффективного использования глубоководных аппаратов их общее время пребывания под водой должно возрастать с ростом рабочей глубины погружения.
На стадии проектирования, кроме того, нужно было решить, какой будет его аварийная автономность, т. е. сколько времени сможет экипаж пробыть в аппарате, если по каким-либо причинам он не всплывает или, например, из-за резкого ухудшения погоды его нельзя поднять на борт судна-носителя. На случай аварии в аппарате должны быть предусмотрены все необходимые средства жизнеобеспечения членов экипажа. К таким средствам относятся аварийные аккумуляторные батареи, так как основные могут быть использованы в качестве сбрасываемого балласта, запасы кислорода и поглотителя углекислого газа или химические средства регенерации, а также аварийный запас воды и пищи.
В мировой практике эксплуатации подводных аппаратов известно несколько аварий, когда аппараты долгое время не могли всплыть с грунта. Так, в октябре 1969 г. американский подводный аппарат "Дип Квест" работал в Калифорнийском заливе на глубине 130 м. На гребной винт намотался трос, из-за чего аппарат не мог всплыть на поверхность в течение 30 ч. Освободили его из этого "плена" с помощью другого подводного аппарата "Нектон Альфа". Экипаж остался жив.
В сентябре 1973 г. подводный аппарат "Пайсиз III", принадлежавший Великобритании, работал в Атлантическом океане у побережья Ирландии. Вследствие технической неисправности он затонул на глубине около 450 м. Аппарат с экипажем был спасен через 74 ч с помощью трех других аппаратов, среди которых был телеуправляемый необитаемый аппарат Курв", отличившийся при подъеме водородной бомбы в Паламарисе.
Подводный аппарат "Джонсон Си-Линк" в 1973 г. обследуя затонувший корабль у побережья Флориды, зацепился за его леерное ограждение на глубине 110 м. Через 16 ч два акванавта, которые находились в шлюзовом отсеке аппарата, погибли от переохлаждения. В катастрофе погиб сын знаменитого американского конструктора подводных аппаратов Эдвина Линка. Этот аппарат также был освобожден телеуправляемым аппаратом "Курв".
Американский аппарат "Алюминаут" однажды воткнулся носом в илистый грунт и не мог освободиться в течение 22 ч.
Одной из важных тактических характеристик подводного аппарата является скорость. Максимальная скорость аппарата ТИНРО-2, предназначенного в основном для проведения визуальных наблюдений, требующих небольших скоростей перемещения относительно грунта, была ограничена несколькими узлами. Этого вполне достаточно для проведения исследований. Большие скорости требуют значительных затрат мощности и запаса электроэнергии, что приводит к возрастанию веса батареи.
Проводить визуальные наблюдения у грунта с такой скоростью, конечно, опасно, так как в условиях плохой видимости можно не заметить подводное препятствие и налететь на него. Так, американский подводный аппарат "Ашера", работая у берегов Турции в 1964 г., налетел на коралловый риф иллюминатором. К счастью, иллюминатор не разбился и аппарат благополучно всплыл. Однако при движении на малых скоростях аппарат плохо управляется, и, кроме того, требуется много времени для обследования даже небольшой площади грунта.
В то время у нас еще не было опыта эксплуатации подводных аппаратов, на основании которого можно со всей определенностью задать необходимую скорость. Поэтому мы остановились на компромиссном решении - минимальная скорость была выбрана равной 1,5-2,0 уз. Максимальные скорости большинства иностранных аппаратов, построенных за это время, составляют около 3,0-4,0 уз, а минимальные - не превышают 1,0-1,5 уз.
Определив основные тактические характеристики ТИНРО-2, такие как водоизмещение, глубина погружения, скорость, автономность, количество членов экипажа, можно было приступить к детальному выбору оборудования.
В первую очередь предстояло разработать энергетическую установку, в состав которой входят источники электроэнергии, электродвигатели и редукторы, передающие вращение на гребные винты.
В настоящее время приблизительно на 80% подводных аппаратов в качестве источников электроэнергии применяют аккумуляторные, преимущественно свинцово-кислотные, батареи. Располагают их снаружи прочного корпуса, что позволяет уменьшить его объем и использовать тяжелую батарею в качестве аварийного балласта. Серебряно-цинковые аккумуляторные батареи применяют реже, что объясняется их высокой стоимостью, меньшим числом циклов заряда разряда. После успешного испытания на американском подводном аппарате "Стар-I" энергетической установки из водородно-кислородных топливных элементов ряд зарубежных фирм взялись за разработку подобных источников энергии. Однако на подводных аппаратах, предназначенных для проведения биологических исследований, каким является ТИНРО-2, применять такие источники нельзя, так как в результате их работы за борт выводится азот, кислород и другие химические элементы, которые могут внести нежелательные изменения в окружающую среду и повлиять на поведение морских организмов.
Для аппарата ТИНРО-2 было решено использовать погружные свинцово-кислотные аккумуляторные батареи и разместить их под прочным корпусом в нескольких контейнерах, причем один из них предполагалось использовать как аварийный сбрасываемый балласт, если аппарат не сможет всплыть обычным способом.
В отличие от подводных лодок, которые изменяют глубину погружения за счет гидродинамических сил, возникающих на горизонтальных рулях лодки при ее движении, большинство подводных аппаратов погружается и всплывает за счет упора вертикальных или поворотных гребных винтов.
На подводных аппаратах устанавливают обычно вмещенные вертикальные и горизонтальные движители; электродвигатели погружного исполнения, которые поворачиваются вокруг горизонтальной оси, располагают по бортам. Иногда устанавливают водометные движители с поворотными соплами.
На ТИНРО-2 планировалось поставить электродвигатели. Но как их разместить? Мы проанализировали различные компоновочные схемы и пришли к выводу, что лучше всего их установить в прочном корпусе. Правда, при погружении на глубины больше 1000 м в дейдвудном сальнике - уплотнении, через которое проходит гребной вал - происходят значительные потери мощности. Вследствие этого пришлось бы значительно увеличить общую мощность электродвигателя. Кроме того, усложняется конструкция упорного подшипника, который испытывает нагрузки от упора винта и гидростатического давления. Однако ТИНРО-2 погружается только до 400 м, поэтому окончательно была выбрана схема движительного комплекса аппарата, которая состояла из электродвигателей, предназначенных для горизонтального и вертикального перемещения аппарата и расположенных внутри прочного корпуса. При таком расположении движительных комплексов должен был уменьшиться уровень шума, создаваемый аппаратом под водой, что благоприятствует проведению научных биологических исследований.
В процессе проектирования было рассмотрено много вариантов реверсирования и регулирования частоты вращения горизонтального и вертикальных гребных винтов. На зарубежных аппаратах это часто осуществляют изменением частоты переменного тока электродвигателей. Для преобразования постоянного тока в переменный используют статические преобразователи. На нашем аппарате было решено применить механическое регулирование. Устанавливать электродвигатели постоянного тока и изменять частоту вращения, меняя напряжение, или электродвигатели с несколькими обмотками статора для ступенчатого регулирования частоты вращения было неприемлемо, так как это могло ограничить маневренность аппарата.
Оптимальной была бы схема плавного регулирования частоты вращения винтов от нуля до максимального в обе стороны с помощью бесступенчатых фрикционных реверс - регуляторов, или вариаторов. Она и была применена на аппарате.
Для того чтобы неповоротные вертикальные винты аппарата при погружении и всплытии развивали максимальный упор, были приняты специальные конструктивные меры, в результате чего скорости всплытия и погружения аппарата были одинаковыми. Большое внимание при проектировании подводного аппарата уделялось обеспечению герметичности отверстий в прочном корпусе. К таким отверстиям относятся иллюминаторы, кабельные вводы и проходы различных валов. Иллюминаторы обычно делаются самоуплотняющимися, т.е. при повышении наружного давления с ростом глубины погружения они сильнее прижимаются своей боковой конической поверхностью к отверстию вварыша в корпусе аппарата. Кабельные воды могут уплотняться по такому же принципу, трудность заключается только в обеспечении тщательной пригонки отверстия вварыша и боковой поверхности иллюминатора или кабельного ввода.
Для обеспечения герметичности прохода валов гребных винтов через прочный корпус аппарата ТИНРО-2 проектировщики предложили оригинальную систему, которая не только надежно уплотняла валы, но и позволяла постоянно контролировать исправность уплотнений. Такая система значительно облегала подготовку аппарата к погружению и повышала безопасность плавания.
Для управления аппаратом по курсу была установлена поворотная насадка гребного винта с гидравлическим приводом.
Эффективно, с минимальными затратами электроэнергии, аппарат может двигаться у грунта лишь в том случае, если он точно вывешен, т. е. если он невесом в воде. Плавучесть аппарата постоянно меняется из-за изменения обжатия прочного корпуса в зависимости от глубины погружения, а также изменения плотности, солености, температуры забортной воды. Для достижения нулевой плавучести сделаны специальные уравнительные цистерны. С увеличением глубины погружения из-за обжатия корпуса аппарат становится тяжелее и для сохранения его нулевой плавучести необходимо откачать из уравнительных цистерн какое-то количество воды за борт. Однако при этом увеличивается плотность забортной воды и уменьшается ее температура, что делает аппарат легче. Иногда действия этих двух сил почти уравновешивают друг друга и надобность в изменении плавучести аппарата отпадает.
На ТИНРО-2 было решено совместить уравнительные цистерны с дифферентными и расположить их в носу и корме прочного корпуса.
Для приема и откачки забортной воды служит специальный поршневой насос. С его помощью можно также перекачивать воду из носовой дифферентной цистерны в кормовую и обратно для выравнивания или создания дифферента.
На некоторых зарубежных подводных аппаратах система гидравлики вместе с насосом вынесена из прочного корпуса и сделана разгруженной относительно забортного давления. По такому же принципу делают иногда и дифферентно - уравнительную систему. На аппаратах, имеющих глубину погружения более 1000 м, это позволяет получить некоторый выигрыш в весе этих систем. На аппаратах с глубиной погружения несколько сот метров такого выигрыша нет. Поэтому на аппарате ТИНРО-2 эти системы вместе с насосами располагались внутри прочного корпуса и в качестве привода имели электромотор.
Для управления движением аппарата в нескольких режимах, от ручного до автоматического, предназначалась специальная система. Предусмотрен также режим стабилизации аппарата по глубине при его движении и при неподвижном зависании на одном месте.
При движении у грунта командир аппарата, которому грунт плохо виден, передает управление подводному наблюдателю. Для этого предназначается выносной малогабаритный пульт. На него вынесены основные рукоятки управления движением аппарата. С помощью одной из них можно изменять глубину погружения и курс аппарата, с помощью другой - скорость и направление движения (вперед и назад). Выносной пульт включает командир аппарата с главного пульта и в любой момент, например при возникновении какой-то сложной ситуации, может немедленно переключить управление на себя.
Системы управления режимами движения дублированы. Так, если по какой-то причине автоматическое управление отказывает и аппарат "сбивается" с заданного курса, то командир может перейти на ручное дистанционное управление, выведенное на единую рукоятку управления. Если и этот способ оказывается недейственным, то можно перейти на аварийный режим. В этом случае изменятся параметры движения аппарата с помощью тумблеров, а исполнительные механизмы работают в режиме "включено - выключено". На самый крайний случай предусмотрено ручное механическое управление всеми исполнительными механизмами.
Для того чтобы аппарат мог двигаться на постоянном расстоянии от грунта и при необходимости останавливаться над каким-то определенным местом, предусмотрен якорь-гайдроп. Это тяжелый металлический груз, который опускается с аппарата на тонком якорном канате специальной лебедкой, расположенной в легком корпусе аппарата. Якорь-гайдроп удерживает аппарат над грунтом, если в уравнительные цистерны принято дополнительное количество воды. При движении с опущенным якорем-гайдропом аппарат будет как бы повторять все возвышенности и впадины грунта. Если якорь за что-нибудь зацепится и его невозможно будет втянуть обратно в аппарат, то трос можно перерезать специальным пневматическим резаком.
На ТИНРО-2 якорь-гайдроп размещен в кормовой части, чтобы ил, поднимаемый им при движении, не мешал проводить наблюдения через иллюминаторы. Для определения момента касания грунта якорем имеется устройство, которое при провисании троса выключает электродвигатель лебедки. Особое внимание при проектировании аппарата уделялось безопасности плавания. Для ее обеспечения предусмотрено несколько дублирующих способов всплытия аппарата.
Обычно ТИНРО-2 всплывает с помощью вертикальных винтов. Если по какой-либо причине вертикальные винты не включаются, то всплыть можно, откачав какое-то количество воды из дифферентно-уравнительных цистерн с помощью насоса. Если полностью израсходованы запасы электроэнергии, нельзя включить вертикальные винты и пустить насос для откачки воды, то можно продуть балластные цистерны воздухом высокого давления. Запас воздуха на аппарате принят достаточным для создания относительно большой положительной плавучести при продувании балластных цистерн, даже на рабочей глубине погружения. По мере всплытия вследствие уменьшения забортного давления воздух, объем которого должен постоянно увеличиваться, вытесняет все большее количество воды из балластных цистерн, в результате чего растет скорость подъема аппарата.
В крайнем случае аппарат всплывет, если сбросить под действием сжатого воздуха аварийный балласт, состоящий из якоря-гайдропа и аккумуляторной батареи. Необходимый для этого воздух хранится в особых баллонах и не расходуется на продувание балластных цистерн.
Если аппарат зацепится за что-то у грунта на глубине 400 м, то для всплытия придется воспользоваться всеми способами сразу, а положительная плавучесть, которую можно придать аппарату в реальных условиях, будет практически всегда достаточна для его отрыва и всплытия. Чем меньше глубина, на которой застрял аппарат, тем больше эта сила, так как можно освободить от воды больший объем балластных цистерн.
Специальные системы предусмотрены для борьбы с пожаром. В мировой практике эксплуатации подводных аппаратов известно несколько случаев возникновения пожара. Так, в 1974 г. на одном из японских подводных аппаратов в результате короткого замыкания загорелась изоляция кабеля. И хотя аппарат быстро всплыл на поверхность, так как находился на небольшой глубине, экипаж, состоящий из двух человек, спасти не удалось. По-видимому, на этом аппарате не были предусмотрены индивидуальные средства защиты органов дыхания экипажа.
На ТИНРО-2 установлена воздушно-пенная противопожарная система. Пена, получаемая в результате подачи сжатого воздуха в пенообразователь, нетоксична и обладает диэлектрическими свойствами, поэтому она пригодна для тушения загоревшегося электрооборудования, находящегося под напряжением.
Для того чтобы экипаж не задохнулся от задымления и токсичных газов, вблизи каждого члена экипажа установлены акваланги. Запаса воздуха в каждом из них хватает для дыхания при атмосферном давлении на 1 ч. Этого времени достаточно для организации борьбы с пожаром и всплытия аппарата на поверхность.
При проектировании ТИНРО-2 были рассмотрены все возможные аварийные ситуации, в том числе и такие, когда судно-носитель по какой-либо причине не может поднять аппарат на борт, например вследствие резкого ухудшения погоды, выхода из строя механизмов спуско-подъемного устройства, аварий самого судна и т. п. Иногда в таких сложных ситуациях необходима буксировка аппарата. Поэтому было предусмотрено буксирное устройство. Буксирный конец подается на судно-носитель с помощью линемета, установленного вне прочного корпуса аппарата. Предельные значения волнения моря и силу ветра, при которых можно буксировать аппарат, предстояло определить во время испытаний.
Для того чтобы подводный исследователь мог хорошо видеть дно на любой глубине, а при необходимости производить кино - и фотосъемку, на аппарате нужно было установить подводные светильники и импульсные лампы-вспышки большой мощности, предварительно определив их местоположение. Если расположить светильники выше иллюминаторов и направить их свет вертикально вниз, то наблюдателю грунт будет казаться ровным и гладким, как стол. При фотографировании с таким освещением истинная картина также может быть искажена. Верхнее освещение позволяет хорошо рассмотреть обитателей грунта, зато боковое позволяет ориентироваться среди подводных препятствий, но затрудняет наблюдение за подводными обитателями. Кроме того, при движении аппарата у грунта образуется большое количество взвесей, поднимается муть, поэтому светильники целесообразно расположить ниже иллюминаторов, как можно ближе к грунту, примерно так, как ставят противотуманные фары на автомобилях.
Взвесив все эти противоречивые требования, мы приняли компромиссное решение. Два светильника с широким лучом расположили в выступающей вперед верхней части легкого корпуса таким образом, чтобы они освещали пространство перед иллюминаторами; импульсную лампу-вспышку и узкополосный светильник дальнего света направили вперед с небольшим наклоном вниз для визуального определения препятствий перед аппаратом. Два других светильника разместили по бортам в носовой части аппарата таким образом, что они хорошо освещали пространство, наблюдаемое из боковых иллюминаторов. При желании эти светильники можно было поворачивать и для освещения передней зоны наблюдения.
На некоторых зарубежных аппаратах светильники, а иногда и другое навесное оборудование располагают на выдвижных или поворотных штангах. Такой способ имеет определенные преимущества, так как светильник или другой прибор максимально приближается к объекту наблюдения. Меняющийся при повороте или выдвижении штанг дифферент аппарата компенсируется за счет перекачки воды в дифферентных цистернах. При подъеме и спуске аппарата штанги либо укладываются вдоль его бортов, а светильники и приборы заходят в специальные ниши в легком корпусе, либо задвигаются гидравликой в междубортное пространство.
Приблизительно такого типа штанги предполагалось установить и на аппарате ТИНРО-2.
Однако в процессе проектирования аппарата конструкторы постоянно искали лучшие варианты размещения оборудования. Все приборы и устройства, устанавливаемые вне прочного корпуса, рассматривались в первую очередь с точки зрения безопасности движения аппарата у грунта. Поэтому от поворотных штанг решили отказаться, так как они представляют серьезную опасность при движении аппарата вблизи грунта. В нижней носовой части легкого корпуса была установлена импульсная лампа-вспышка. Все лампы-вспышки включались с одного пульта и имели синхро-контакт для фотографирования. Для съемок через иллюминаторы были установлены широкоформатный фотоаппарат "Салют" и кинокамера "Конвас-автомат", работу которых решено было проверить во время испытаний.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'