Спасательные аппараты
DSRV (США)
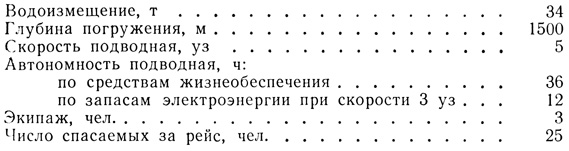
Трагическая гибель подводной лодки "Трешер", унесшая 129 жизней, послужила толчком к пересмотру способов спасения подводников. В итоге командование ВМС США приняло решение о создании новой системы спасения, основу которой составили спасательные аппараты DSRV, способные эвакуировать на поверхность экипажи затонувших подводных лодок с любых глубин до предельных включительно. Принципиально спасательная операция протекает следующим образом. Аппарат доставляют к месту аварии на палубе атомной подводной лодки, затем он отделяется, идет самостоятельно на сближение с лодкой, потерпевшей аварию, выполняет операцию посадки на комингс-площадку спасательного люка (ту самую, на которую при старом способе спасения опускали колокол Маккена) и присасывается к ней. Посадку обеспечивает манипулятор аппарата, посредством которого трос-проводник крепится к рыму крышки спасательного люка лодки (рис. 11) , а комингс-площадка очищается от водорослей и ила. Последнее выполняется с помощью металлической щетки и шланга для подачи воды, которые удерживаются и направляются захватом манипулятора. Окончательная стыковка выполняется подтягиванием аппарата к комингс-площадке за трос-проводник специальной лебедкой, размещенной в камере присоса. После стыковки, удаления воды из камеры присоса и выравнивания давления в спасательной шахте лодки и шлюзовой камере аппарата 24 члена спасаемого экипажа лодки переходят в аппарат, который затем возвращается к лодке-носителю и осуществляет посадку на нее аналогичным образом. Для полного спасения экипажа современной атомной подводной лодки эта операция должна повторяться пять - семь раз.Продолжительность одной операции составляет 16-17 ч. Таким образом, даже при использовании двух спасательных аппаратов, около 69 ч потребуется только на эвакуацию терпящего бедствие экипажа. Естественно поэтому, что быстрота доставки DSRV к месту аварии тем более необходима для успеха всей операции.
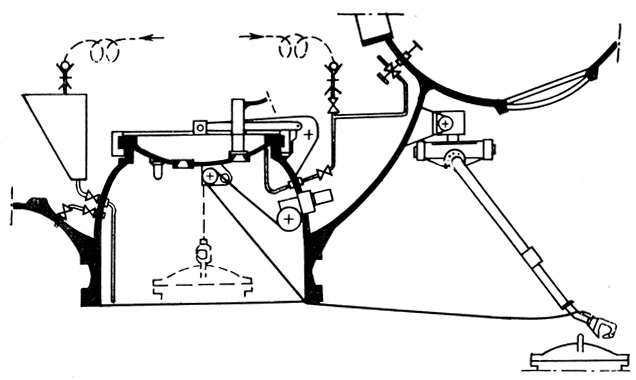
Рис. 11. Схема крепления троса-проводника к рыму крышки люка аварийной лодки спасательным аппаратом DSRV
Обеспечение возможности переброски DSRV воздушным транспортом было одним из основных требований, предъявленных военно-морскими силами США проектанту аппарата. Схема доставки DSRV к месту спасательных работ, включающая использование самолетов, показана на рис. 12 [10]. Из пункта своего базирования аппарат доставляется автотрейлером на аэродром. Туда же в автофургоне перевозят обеспечивающее аппарат оборудование. Все это грузят в реактивные транспортные самолеты типа С-141 и доставляют в аэропорт, ближайший К району аварии, а оттуда снова автотранспортом - в пункт базирования атомной подводной лодки-носителя. Последняя развивает с аппаратом скорость до 15 уз.
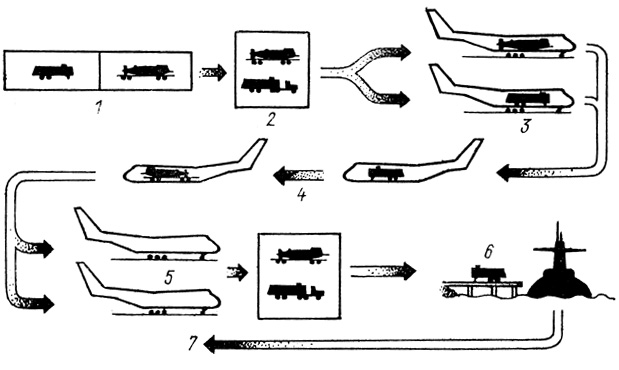
Рис. 12. Схема организации доставки спасательного аппарата DSRV к месту аварии подводной лодки. 1 - пункт базирования DSRV; 2- перевозка аппарата и обеспечивающего оборудования на аэродром; 3 - погрузка аппарата, трейлера и фургона с обеспечивающим оборудованием на реактивные транспортные самолеты; 4 - транспортировка по воздуху; 5 -разгрузка на аэродроме назначения и транспортировка наземным способом к пункту базирования атомных подводных лодок-носителей аппарата; 6 - погрузка на борт подводной лодки-носителя; 7 - транспортировка к месту аварии
Расчетное время доставки аппарата рассмотренным образом из пункта его базирования к месту проведения спасательных работ, расположенному в любом районе Мирового океана, не Превышает 42 ч [10].
Подводная лодка-носитель может транспортировать спаса-тельный аппарат в район аварии в подводном положении. Это позволяет проводить спасательные работы даже в штормовых условиях. ВМС США модернизировали 40 подводных лодок для возможности выполнения ими роли носителя DSRV, если воз-никнет в этом необходимость.
Судном обеспечения работы аппарата является специально оборудованный для этого катамаран типа ASR. Он способен также доставить аппарат к месту спасательных работ, т. е. выполнить функцию носителя. Максимальная скорость его 15 уз. На палубе размещается два аппарата DSRV. Судно имеет устройства для подъема и спуска аппаратов на воду, для зарядки аккумуляторных батарей и другое обеспечивающее оборудование.
Программой развития глубоководной техники (США) предусматривалось строительство сначала двенадцати аппаратов DSRV, затем число их было снижено до шести, поскольку задача оказалась достаточно сложной и потребовала к тому же расходов в 10 с лишним раз больше первоначально запланированной суммы. В итоге построено только два аппарата - DSRV-1 и DSRV-2, введенные в строй, как сообщили ВМС США в 1978 г.
Прочный корпус DSRV состоит из трех сфер диаметром 2,28 м, соединенных между собой. Носовая сфера служит для размещения двух членов экипажа, приборов и аппаратуры управления. В. средней, и кормовой сферах размещается спасаемый личный состав аварийной лодки и врач-физиолог всего 25 человек за один рейс. По средствам регенерации система жизнеобеспечения рассчитана на работу в течение 12 ч для носовой сферы (с резервом на 24 ч), а для средней и носовой сфер - по 2 ч на один рейс для каждой (с резервом на 24 ч).
Средняя сфера соединена с кормовой непосредственно, а с носовой - через шлюзовую камеру, которая, в свою очередь, соединяется с камерой присоса. Средняя сфера имеет также люк в своей верхней части. Поступательное движение аппарата осуществляется с помощью маршевого винта в поворотной насадке. Кроме того, имеются подруливающие устройства. Подъем и погружение выполняют с помощью вертикального винта. Источником энергии служат серебряно-цинковые аккумуляторные батареи, рассчитанные на 12 ч работы при скорости хода 3 уз [28, 32]. Максимальная подводная скорость 5 уз. Рабочая глубина аппарата 1500 м в достаточной мере перекрывает предел допустимого погружения современных атомных подводных лодок США [28, 32].
Гидроакустическое оборудование аппарата позволяет ему поддерживать связь с лодкой-носителем, обеспечивающим судном и аварийной лодкой, а также ориентироваться в обстановке - выявлять препятствия по ходу движения в полосе 480 м и на дистанции по курсу до 1450 м; определять свое отстояние от поверхности и грунта, скорость относительно грунта и дистанцию до аварийной лодки.
Высокочастотный гидролокатор, антенна которого находится в камере присоса, обеспечивает маневрирование над палубой аварийной лодки и распознавание комингс-площадки ее спасательного люка, когда среда имеет низкую прозрачность и визуальные средства наблюдения мало эффективны. При удовлетворительной видимости для посадки на комингс-площадку служат телевизионные камеры, светильники и иллюминатор со зрительным устройством в камере присоса. В обоих случаях стыковка выполняется с точностью до 5 см, при наклоне палубы аварийной лодки до 45° и скорости придонного течения до 3 уз [41]. Крен и дифферент аппарата, необходимые для посадки на наклонную палубу, создаются ртутной крено-дифферентной системой.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'