Промысловый флот будущего
Стремительное развитие современной науки и техники вступает в такую фазу, когда воплощаются в действительность самые смелые замыслы недавнего прошлого. В наше время могут быть решены даже такие задачи, которые кажутся на первый взгляд фантастическими. Поэтому нет никакого сомнения, что при соответствующей концентрации усилий ученых и инженеров вполне реально создание совершенно новых, в корне отличающихся от существующих и более эффективных промысловых судов и орудий лова.
Совершенствование промыслового флота до сих пор шло по пути развития надводных судов: обычные весельные и парусные суда, а затем и суда с механическими двигателями более или менее удачно приспосабливались для морской охоты и рыболовства. В то же время созданный за последние 50 лет мощный подводный флот используется в военных целях и не приспособлен ни для научных исследований, ни для поиска рыбы и морского зверя, ни тем более для подводного промысла. На предложения применить подводные лодки для развития рыболовства до недавних пор внимания не обращали, хотя эти предложения многообещающие и перспективные.
В самом деле, до сих пор рыбу ловят только в самых верхних слоях моря или у дна, но на глубинах не более 300-600 м. При добыче рыбы надводными судами не удается использовать более глубокие горизонты, где также имеются скопления промысловых рыб.
Лов донных рыб и добыча водорослей с надводных судов при современном развитии техники уже кажется нелепостью. Это, по существу, выглядит так же, как если бы человек, поместившись на дирижабле, с 400-метровой высоты занялся обработкой полей, косил сено и гонял отары овец.
Только большое количество рыбы и морского зверя в определенных и доступных районах давало возможность человеку вести промысел без особых забот. Но все чаще обеднение этих привычных промысловых районов вынуждает вести морской промысел в новых районах и на больших глубинах специальными - а в ближайшем будущем - и подводными судами.
Подводная лодка Северянка, с которой уже познакомился читатель, является большим научно-исследовательским подводным судном. Советские ученые умело использовали тактические свойства переоборудованной лодки и уже сделали немало ценных открытий в области промысловой океанографии.
Эффективность применения подводных научно-исследовательских судов в значительной мере зависит от глубины погружения, поэтому специально построенное глубоководное судно сможет принести больше пользы, чем переоборудованная подводная лодка. Во всех случаях техника подводного флота, имеющая уже трехсотлетнюю историю, должна быть широко использована в мирных целях, а не для войны.
Одной из причин, тормозивших до последнего времени развитие подводных кораблей с большой автономностью, было отсутствие двигателей, способных работать под водой неограниченно длительное время без подачи кислорода.
Практическое использование атомной энергии открыло широкие перспективы для ее применения в подводном флоте. Ядерное топливо для подводных судов имеет неоспоримые преимущества. Во-первых, концентрация энергии в ядерном топливе при малом его общем объеме в миллионы раз выше, чем в обычном, что позволяет принимать запас топлива, обеспечивающий огромную дальность плавания; а во-вторых, при получении энергии из этого топлива вовсе не требуется кислород. Эти свойства ядерного топлива позволяют создать подводные суда с практически неограниченной автономностью.
Безусловно, создание судов-атомоходов - это выдающееся достижение техники двадцатого века. Но все же современные атомные реакторы являются пока лишь первыми шагами в деле применения атомной энергии на транспорте. Необходимость мощной биологической защиты, представляющей тяжелое и громоздкое сооружение, наличие большого количества теплообменных аппаратов и сложнейшего оборудования значительно увеличивают стоимость, вес и габариты установок на атомном горючем. Относительно тяжелыми получаются установки малой мощности (до 10000 л. с). Вес такой установки составляет примерно 100 кг на 1 л. с. мощности, в то время как для дизельных энергетических установок такой же мощности эта величина не превышает 30 кг.
Однако атомная энергетика развивается все убыстряющимися темпами. Очевидно, в ближайшие годы решится проблема биологической защиты и для мирного подводного флота будут созданы более простые, мощные и в то же время малогабаритные энергетические установки на атомном горючем. Проектируются установки небольшой мощности для батискафов и лодок-малюток.
Создаются также принципиально новые энергетические установки, в которых ядерная энергия непосредственно превращается в электрическую, без предварительной трансформации в тепловую энергию для использования в обычных паровых турбинах.
Другой не менее важной и актуальной проблемой является создание новых и более современных движителей.
До сих пор для движения любого судна применяются лопастные движители, которые, отбрасывая воду назад, создают реактивную силу, движущую судно вперед. Гребной винт, насос водомета или крыльчатый движитель - все они работают по принципу лопасти весла, загребающего воду. Возраст весла трудно установить, но, вероятно, оно было изобретено еще в каменном веке. Тем не менее, даже современные атомные суда пока пользуются лопастными движителями - гребными винтами. Таким образом, в судостроении техника XX в. пока сочетается с техникой доисторической. Конечно, с этим нельзя мириться; коэффициент полезного действия даже лучших лопастных движителей обычно не превышает 50%. Миллионы тонн дорогого топлива ежегодно расходуются зря - на бесполезное образование волн и возмущение воды за кормой...
Разумеется, инженерная мысль работает над изобретением новых движителей, преобразующих тепловую или электрическую энергию непосредственно в работу отбрасываемой воды. Очевидно, мы будем свидетелями появления подобных движителей, и принцип работы двигателей современных реактивных самолетов и космических кораблей найдет применение на судах.
Такие гидрореактивные (уже не лопастные!) движители должны быть простыми, надежными в работе и иметь высокий коэффициент полезного действия. Сам движитель можно представить в виде конической трубы, направленной широким раструбом в корму. В передней части движителя, также несколько расширяющейся, устанавливается невозвратный клапан, открывающийся под давлением встречного потока воды. В узком сечении трубы расположены дюзы, соединенные с взрывной камерой. В эту камеру порциями подается топливо и окислитель; после взрыва газы через дюзы устремляются в рабочий раструб движителя, и с силой выталкивают воду. Внешнее давление вновь открывает клапан, труба снова заполняется водой и следующий взрыв стремительно выбрасывает новую струю воды...
В современных судовых двигателях подобный взрыв топлива, смешанного с кислородом воздуха, происходит в камере сгорания. Образовавшиеся газы с силой давят на поршень двигателя, перемещая его вдоль цилиндра, а затем возвратно-поступательное движение поршней превращается во вращательное движение вала, которое преобразуется гребным винтом в поступательное движение воды, создающей упор для движения судна.
В гидрореактивном судовом движителе взрывоподобное сгорание топлива будет происходить в самом движителе; взрывные газы станут толкать не поршень двигателя, а непосредственно воду, обеспечивая движение судна. Сложная и громоздкая энергетическая установка, состоящая из судового двигателя, системы валов и гребного винта, уйдет в прошлое так же, как это произошло при создании реактивных самолетов.
Обнадеживающие перспективы открываются и при использовании силы электрического разряда под водой. Давно было замечено, что такой разряд способен производить на глубине механическую работу - разрушать камни, уплотнять вещество, вызывать мощные гидравлические удары. Если вместо дюз в узком сечении гидрореактивного судового движителя установить два электрода и подавать на них мощные, но короткие импульсы электрического тока, то электрический разряд будет выбрасывать воду из раструба движителя. В остальном цикл работы движителя такой же, как и при взрывоподобном сгорании топлива. В данном случае электрическая энергия будет непосредственно трансформироваться в механическую энергию выбрасываемой струи воды.
Инженеры предполагают, что каждое крупное судно будет иметь не один, а несколько десятков гидрореактивных движителей. Это позволит создать большую и плавную тягу. Выполнив часть движителей поворотными, можно обеспечить хорошую управляемость судна. Применение атомных установок на подводных судах позволяет намного увеличить мощность двигателя, а, следовательно, и скорость хода. Поэтому большое значение придается разработке наиболее выгодной формы корпуса. Корпусам быстроходных подводных лодок придают легко обтекаемую каплеобразную или сигарообразную форму, так как благодаря этому удается снизить сопротивление водной среды движению судна. На первый взгляд кажется невероятным, чтобы идущее на глубине подводное судно встречало меньшее сопротивление воды, чем надводное (при равных размерениях и скорости). Однако это так, и при равных условиях рационально спроектированное подводное судно благодаря снижению затрат мощности на волнообразование может иметь более высокие гидродинамические свойства и развивать большую скорость, чем надводное судно.
Выбор таких обтекаемых форм подсказан самой природой, которая эволюционным путем в течение многих миллионов лет совершенствовала наиболее рациональные формы тела и устройства "движителей" быстроходных рыб. Многочисленные обитатели моря пересекают с большой скоростью огромные расстояния, измеряемые многими тысячами километров.
Оптимальная гидродинамическая форма, совершенные движители и рули - хвост и плавники - и особые свойства поверхности тела рыб и морских животных внимательно изучаются инженерами. Многое из созданного природой копируется при создании быстроходных подводных судов.
Дальнейшее повышение скорости подводных судов связано с необходимостью не только увеличения мощности двигателей, но и преодоления кавитационного барьера. Не вдаваясь в подробности теории кавитации, это явление можно объяснить так: при сверхвысоких скоростях на поверхности тела, движущегося в воде, периодически возникают пузырьки водяного пара. Когда эти пузырьки лопаются, поверхность тела подвергается громадному давлению. Происходит явление, напоминающее концентрацию энергии взрыва, которая приводит к разрушению самых прочных материалов. Кавитация хорошо известна кораблестроителям по многочисленным случаям разрушений быстроходных гребных винтов.
Исследования кавитационного эффекта и опыты с моделями привели к неожиданным результатам. Оказалось, что вредное явление кавитации может быть даже полезным. Было установлено, что при определенных условиях движения модели в воде на сверхвысокой скорости возникает столь большая кавитационная полость, что вся модель помещается в ней, соприкасаясь с водой лишь небольшой поверхностью в носовой и кормовой части. Это открытие позволит в будущем создавать подводные суда, которые при сверхвысоких скоростях будут полностью покрыты тонкой паровой оболочкой, не только предохраняющей обшивку от кавитационного разрушения, но и снижающей сопротивление трения воды о корпус.
На больших глубинах исчезнут потери энергии на волнообразование. Вся мощность энергетической установки будет затрачиваться на преодоление трения и перемещения массы воды, равной объему судна, за корму со скоростью, равной его движению. Подобный процесс "широко известен в природе"; достаточно вспомнить глубоководных кальмаров, развивающих скорость свыше 70 км/ч...
При наличии мощной энергетической установки, работающей, например, на ядерном горючем, подводные суда смогут развивать скорости свыше 100 уз. Пока это дело будущего, но развитие науки и техники открывает все новые перспективы.
Мы рассказали лишь о нескольких проблемах, над которыми работают кораблестроители многих стран, добиваясь дальнейшего увеличения скорости и дальности плавания подводных судов. Во многих странах созданы специальные круговые бассейны, в которых моделируется сверхбыстрое движение тел на глубине; гидродинамические и кавитационные трубы; к услугам ученых сложнейшая исследовательская аппаратура и вычислительные центры.
Техника подводного плавания развивается исключительно быстрыми темпами. Уже никого не удивляют ни скорости более 30 уз, ни переходы под льдами Северного полюса, ни кругосветные плавания боевых лодок без всплытия на поверхность.
Теперь перед народами всего мира стоит задача огромной, первостепенной важности: добиться, чтобы усилия лучших инженеров и ученых многих стран были направлены не на гонку вооружений и развитие средств уничтожения - вооруженных ракетами атомных подводных лодок и ракетных баз, а на создание мирной подводной техники флота для исследования океанских глубин, превращение океана в рационально организованное хозяйство - неисчерпаемый источник пищевого и минерального сырья и энергии.
Для освоения Мирового океана необходимы самые разнообразные специализированные глубоководные суда. Среди них особое место занимают оснащенные специальной аппаратурой тихоходные суда, предназначенные для проведения научных исследований, разведения рыб и морских млекопитающих и выполнения всевозможных хозяйственных работ на любых глубинах, до максимальных включительно. Такие суда строятся с поворотными гребными винтами, обеспечивающими движение по вертикали и горизонтали.
Другие типы подводных судов должны быть быстроходными. Можно предположить, что в их числе значительную часть составят суда подводного рыбохозяйственного флота, которые будут заниматься перегоном морских животных, ловить рыбу и добывать морских животных. Промысловые суда будут поднимать свой улов из глубин и доставлять его к плавучим базам-заводам (для переработки в консервы и всевозможные копчености, посолы и т. д.) или на рыбоморозильные рефрижераторные суда для перевозки на береговые холодильники.
Плавучие базы - большие океанские суда, подобные рыбопромысловой базе Восток, будут заниматься добычей и переработкой морепродуктов. Представьте себе, что база несет на себе флотилию из десяти - двадцати подводных рыболовных судов, похожих на бескрылые самолеты. Маленькие суда, назовем их подводными траулерами, не нужно поднимать из воды и укреплять на палубе базы, даже если предполагается переход в другой промысловый район или возвращение в порт. Место крепления судов-малюток - не палуба, а днище базы. Как рыбы-прилипалы, маленькие суда-торпеды будут "приклеиваться" к днищу на время перехода базы или стоянки, когда траулер заканчивает свой очередной глубоководный промысел.
Если заглянуть на базу из-под воды, то можно увидеть, что под днищем базы, справа и слева от киля, вытянулись два ряда траулеров-малюток. Своими острыми носами они направлены вперед, и поэтому их торпедообразные тела не вызывают большого сопротивления воды движению базы. Для крепления маленьких судов в днище базы сделаны специальные захваты и ниши с люками, ведущими внутрь корпуса.
Закончив промысел, подводный траулер подойдет под днище базы и займет положение носом вперед, строго под входной нишей. Если теперь траулер несколько привсплывет, то его выступающая рубка (где находится входной люк) войдет в нишу, а захваты прижмут траулер к днищу базы и будут прочно удерживать его на месте. Пилот-рыбак откроет люк, выйдет из кабины траулера в нишу, а затем через специальную шахту поднимется во внутренние помещения базы...
Конечно, если потребуется, то можно будет и поднять траулер на палубу базы. Для этого следует запроектировать в днище базы специальную шлюзовую камеру; в такую камеру зайдет траулер и специальный лифт поднимет его из воды.
Плавучие базы должны иметь мощную ультразвуковую станцию для связи с подводными траулерами во время их промысла и гидролокаторы кругового обзора для обнаружения косяков рыбы на различных глубинах и на больших расстояниях: это позволит наводить подводные траулеры на косяки. Диспетчер-наводчик будет "видеть" и районы концентрации рыбы и находящиеся в глубине траулеры. Держа постоянную звукоподводную связь с пилотами траулеров, он укажет им места скопления рыбы или направление движения косяков. Лов рыбы быстроходными подводными траулерами, наводимыми, ультразвуковой станцией плавбазы, будет напоминать полет истребителей, наводимых на цель при помощи наземных радарных установок.
Буксируемый разведчик
Каждый траулер оборудуют и собственным гидролокатором, но, разумеется, дальность его действия будет значительно меньше, чем у мощной ультразвуковой станции базы.
Какими же можно представлять себе подводные траулеры-малютки?
В любом случае такое судно сохранит прочный корпус, способный выдержать давление воды. Прочный корпус, в зависимости от глубины предельного погружения, будет выполнен в виде пустотелого шара или цилиндра со сферическими днищами. На нашем рисунке изображен глубоководный траулер, имеющий два прочных корпуса: шарообразную кабину пилота и цилиндрическую камеру двигателя.
Размеры прочной кабины должны обеспечивать удобное размещение в ней пилота-рыболова и всей аппаратуры. Здесь должны быть установлены приборы управления двигателями и рулями, навигационные приборы (гирокомпас, указатели скорости и глубины), аппаратура ультразвуковой телефонной связи и гидролокатор для обнаружения косяков рыбы или каких-либо препятствий. Здесь же будут расположены приборы для выброса трала и наблюдения за его работой при тралении, а также закрытия трала после заполнения рыбой. Кабина должна быть обеспечена баллонами с кислородом, аппаратурой регенерации воздуха и рядом других устройств и приборов, о которых уже не раз говорилось.
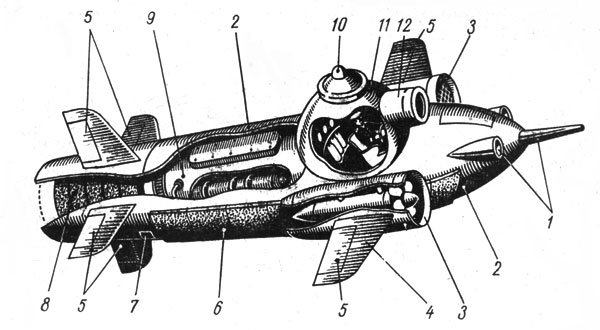
Подводное рыболовное судно будущего. 1 - излучатели и приемники гидроакустических приборов; 2 - легкий корпус; 3 - водометный движитель; 4 - крыло; 5 - рули; 6 - резиновый понтон; 7 - водозаборник для подачи воды, выбрасывающий трал; 8 - траловый отсек; 9 - прочный корпус электростанции; 10 - входной люк; 11 - сферическая кабина пилота; 12 - устройство наведения на рыбный косяк
В верхней части кабины, несколько выступающей за пределы обводов судна, будет расположен входной люк, открывающийся как изнутри, так и снаружи. Ниже люка расположен иллюминатор, через который пилот может вести наблюдение. Конструкции люка, иллюминатора и наружных светильников, по-видимому, не будут значительно отличаться от уже применяемых.
Второй - цилиндрический - прочный корпус предназначен для размещения в нем энергетической установки, работающей, например, на ядерном горючем или на смеси, включающей топливо и окислитель. Для передачи мощности энергетической установки движителям может быть применена электропередача, наиболее гибкая и простая в управлении. В этом случае на валу двигателя будет установлен мощный, но малогабаритный автоматически работающий генератор, а ток, вырабатываемый им, будет по кабелю передаваться двум электродвигателям водометов (общей мощностью около 500 квт).
Движение траулера со скоростью хода около 20 уз или больше (во всех случаях превосходящей скорость рыбы, для лова которой предназначено судно) будет осуществляться с помощью движителей, расположенных с обоих бортов. Электродвигатель и "насос" - водомет каждого движителя работают в воде и "не боятся" наружного давления, поэтому они расположены в общем цилиндрическом корпусе, встроенном в небольшие крылья. Вода забирается через открытое переднее отверстие этого корпуса и с силой выбрасывается насосом движителя через заднюю дюзу; реактивная сила отбрасываемой струи воды и двигает траулер.
Для защиты водометов от попадания рыбы или каких-либо предметов передние (приемные) отверстия корпусов движителей следует закрывать решетками.
Запасы горючего (в случае применения жидкого топлива) можно разместить в легком корпусе; по мере расходования топливо будет замещаться водой. В легкий корпус, который лучше всего изготовить из алюминиевого сплава, заключены оба прочных корпуса. Для уменьшения сопротивления на больших скоростях легкому корпусу должна быть придана наиболее удобообтекаемая форма с плавными обводами выступающих частей; носовая часть будет заостренной.
Легкий корпус - это не только обтекаемый кожух для размещения прочных корпусов и отдельных устройств. Именно он обеспечивает судну положительную плавучесть. Для этого свободные внутренние объемы легкого корпуса, как и в поплавке батискафа, должны быть заполнены легкой жидкостью.
Если в случае выхода из строя двигателей, заклинивания рулей или по каким-либо другим причинам судно потеряет ход и управление, то оно благодаря положительной плавучести обязательно всплывет на поверхность, где будет обнаружено надводными судами.
Для значительного увеличения плавучести по бортам вдоль корпуса можно расположить резиновые камеры. В обычном состоянии они плотно прилегают к корпусу, не нарушая плавности его обводов, но как только потребуется, пилот направит в камеры сжатый воздух, хранящийся в особых баллонах. Эти камеры, заполненные воздухом, раздуваются и, наподобие поплавков-понтонов, надежно поддерживают траулер на плаву.
Небольшие крылья, в которые, как у самолетов, встроены движители, будут иметь и горизонтальные рули. Пилот поворачивает эти рули при помощи электропривода, и судно, подобно самолету, начинает пикировать вниз, подниматься вверх или плыть строго горизонтально. В кормовой части корпуса расположен и вертикальный руль (также управляемый электроприводом), при помощи которого будет осуществляться поворот судна в правую или левую сторону при его подводном и надводной движении. Для повышения устойчивости на курсе в кормовой части неподвижно закреплены стабилизаторы.
Трал или сетка-накопитель рыбы особым способом укладывается в специальное помещение (также расположенное в кормовой части легкого корпуса) и при свободном плавании находится в сложенном состоянии. Как только судно подходит к облавливаемому косяку рыбы, открываются специальные носовые отверстия; встречная струя воды выбрасывает трал через кормовое отверстие, он раскрывается от встречного напора воды, как парашют, и буксируется судном. Трал движется несколько ниже судна, которое как бы проносится над основным косяком рыбы, в его более разреженном слое. Само собой разумеется, что скорость судна после выброса трала и по мере его заполнения рыбой будет замедляться. Трал имеет сетной мешок, так называемый куток, отверстие которого после заполнения рыбой должно быть затянуто специальным тросом. При густом скоплении рыбы трал может быть заполнен в течение нескольких десятков минут.
Как только подводный траулер с заполненным тралом подойдет к плавучей базе, начнется заполнение воздухом резиновых камер. Эти камеры-понтоны поднимут судно настолько, что вся его кормовая часть будет находиться над водой (с целью удобства крепления нового трала, подготовленного заранее для укладки в кормовой отсек). Сдав на базу трал с уловом и получив новый трал, пилот выпустит воздух из камер, и судно снова уйдет в очередной промысловый рейс в глубь моря...
Команда подводного траулера-малютки может состоять всего из одного человека. "Подводный рыбак" будет вести свое судно в глубинных водах, держать связь с судном-базой, которое наведет его на косяки рыбы, выбрасывать сеть и после ее заполнения выводить судно с уловом на поверхность.
В море не всегда имеются густые скопления рыбы. Для концентрации рыбы перед устьем трала или другим залавливающим устройством может быть установлен ультразвуковой конус. Кольцевой излучатель ультразвука, расположенный в носовой части рыболовного судна, образует в толще воды огромную воронку впереди идущего судна. Ультразвуковые стенки конуса не будут тормозить ход судна, но, являясь непреодолимым препятствием для рыбы, соберут ее с большого пространства и сгонят к залавливающему устройству.
Правда, для ультразвукового барьера придется расходовать значительную энергию, но создание мощных источников электроэнергии поможет разрешить эту проблему.
В дальнейшем, когда техника подводного лова будет хорошо изучена и освоена, вместо трала применяют новые орудия лова; будет также решена проблема управления ультразвуком на расстоянии (подобно современному управлению по радио). Инженеры смогут полностью автоматизировать судно-малютку для дистанционного управления им с плавучей базы. В этом случае в прочной стальной сфере будет находиться уже не человек, а сложная электронная аппаратура, воздействующая на соответствующие органы управления.
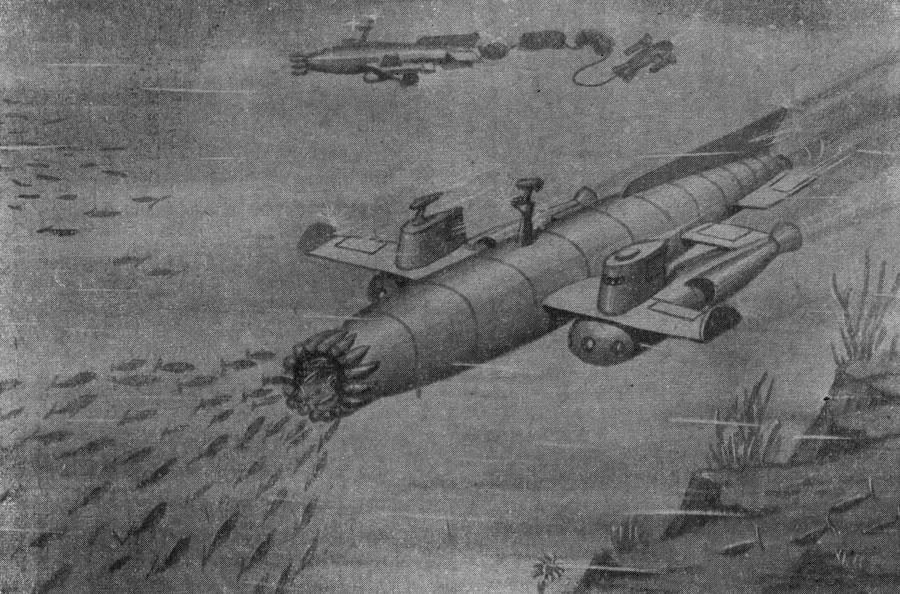
Подводное рыболовное судно с акустическим конусом
Постройка экспериментального подводного траулера-малютки для лова рыбы на различных глубинах - безусловно непростая задача. Однако опыт постройки больших скоростных подводных кораблей с атомными установками, опыт постройки малых (одно- и двухместных) боевых подводных лодок, а также прогулочных и исследовательских аппаратов для плавания на глубине дает основания полагать, что при современном развитии техники решение такой задачи вполне реально. Очень многое из того, о чем мы только мечтали, уже осуществлено при помощи тех аппаратов, с устройством которых читатель ознакомился.
Область применения быстроходных подводных судов не ограничится добыванием рыбы при помощи трала. Такие суда с успехом могут использоваться для охоты за крупными морскими хищниками, например, за теми, с которыми не могут справиться надводные суда.
Суда для охоты за хищниками должны быть, естественно, наиболее быстроходными. Они будут оборудованы специальными пушками и гарпунами, способными не только поражать крупных хищников, но и подманивать их на поверхность. Вместо гарпуна с длинным линем и автоматически надувающимся буем могут быть применены, например, газовые снаряды. Такой снаряд не будет взрываться; его пороховой заряд постепенно выпустит большое количество газа, который раздует тело пораженного животного, после чего оно, как пробка, выскочит на поверхность моря.
Быстроходные суда-охотники можно будет использовать и для подводной охоты за китами. Пользуясь высокой скоростью, превышающей скорость китов, на таких судах можно производить выборочный промысел китов, т. е. бить только самцов, которые по своему возрасту, размерам или виду подлежат убою.
Но не только для промысла рыбы и морских животных могут использоваться глубоководные быстроходные суда-малютки. Они будут незаменимы, например, для сгона рыбы, рассредоточенной на больших пространствах, в плотные скопления для более эффективного облова или перегонки косяков на более продуктивные морские "пастбища". Подобные "пастухи" будут оборудованы специальной аппаратурой, способной создавать гидроакустические лучи-заслоны, отгоняющие рыбу в нужном направлении.
Быстроходные подводные суда потребуются также для транспортировки пассажиров в подводные города и обслуживающего персонала к глубоководным промышленным предприятиям, для выполнения аварийно-спасательных операций и т. д.
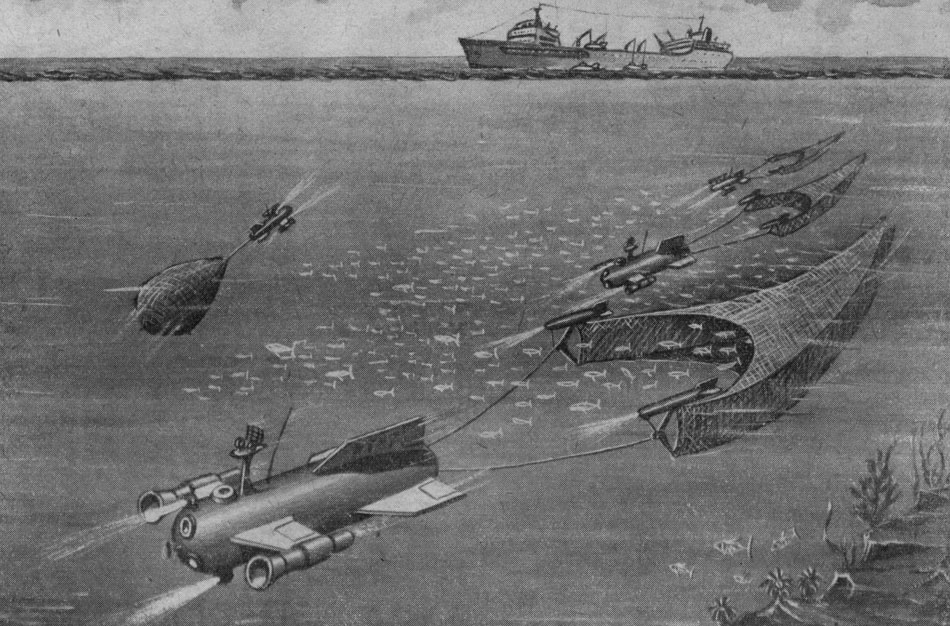
Лов рыбы подводными траулерами
Не исключена возможность создания глубоководных судов с проницаемым корпусом - для перевозки бригад водолазов с поверхности к месту работы на морском дне.
Со временем в гидросфере будет создана подводная транспортная система с базами обслуживания и навигационными маяками для перевозки со дна океана всевозможного сырья и доставки на подводные заводы оборудования, машин и персонала, обслуживающего подводные предприятия и хозяйства.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'