Ныряющие суда
А теперь поговорим о подводном транспорте.
Для начала представим поверхность моря. К берегу, подгоняемые ветром, бегут штормовые волны; вдали они кажутся совсем маленькими, но к пневматическому волнолому подкатываются огромными белогривыми валами. На волноломе, который стоит всегда в каких-нибудь трехстах метрах от берега, кипит гряда бурунов, как будто волны налетают на подводные рифы и обрушиваются на них с ревом и грохотом, а дальше - за волноломом - простирается совершенно спокойная поверхность воды, покрытая лишь серыми полосами мелкой ряби.
Проходит несколько минут, и на этой поверхности появляется всплывшая из глубин большая подводная лодка. Впрочем, это судно мало напоминает подводную лодку: на нем нет рубки, а палуба скорее похожа на спину огромного стального кита. Над этой выпуклой палубой выступает лишь небольшая полусфера, на которой закреплены короткие антенны. Несколько секунд всплывшее судно стоит на месте, как будто ожидая указаний от высоких береговых мачт. Но вот за кормой возникает легкий бурун, и загадочное судно, повинуясь неслышным командам автоматов, медленно разворачивается и входит в канал, далеко уходящий в пологий берег...
Давайте и мы подойдем к каналу, чтобы рассмотреть его получше. Канал имеет совершенно отвесные берега, а в конце его расположена наклонная площадка, выходящая из воды. Невольно вспоминается наклонный продольный стапель, предназначенный для спуска на воду построенных судов. Но это не бетонная площадка, а подвижная лента гигантского транспортера. Его ширина равна ширине канала. Подводная ветвь скрывается в воде, а надводная уходит далеко вверх, оканчиваясь над высокой эстакадой.
Пока мы рассматриваем окружающие сооружения, подводное судно успевает пройти канал и, замедлив ход, остановиться. В тот же момент полотно транспортера приходит в движение. Линия, отделяющая мокрую часть ленты от сухой, все быстрее удаляется от кромки воды... Прошло несколько секунд, и на выбегающей из воды мокрой ленте появились сначала одиночные, а затем наваленные непрерывной грядой крупные и мелкие камни. Это руда, доставленная в порт подводным судном.
Черная мокрая руда быстро перемещается транспортером вверх, а в воде продолжает раздаваться грохот камней, падающих из трюма судна на бегущую под ним ленту. Прошло каких-нибудь 10-15 мин, и шум прекратился. Лента транспортера вынесла на поверхность последние остатки руды и, отправив их вверх, замерла.
Как только закончилась выгрузка, включились ходовые двигатели и судно, вспенив воду, задним ходом медленно пошло к выходу. Вот оно вышло из канала, развернулось носом в сторону открытого моря и... исчезло под водой.
Здесь надо предостеречь читателя от поспешных выводов и, прервав полет нашего воображения, сказать, что авторы попытались представить процесс разгрузки руды в автоматизированном порту, куда подводные суда-автоматы будут доставлять полезные ископаемые из карьеров, расположенных на дне океана.
Впрочем, эта картина не так уж далека от действительности. Так, подводные саморазгружающиеся рудовозы уже вышли из области фантазии. Английская фирма "Митчелл Энджиниринг" строит подводные суда для обслуживания северо-западного побережья Канады. Эти районы океана из-за ледяных полей почти непроходимы для обычных судов, поэтому перевозка руды будет осуществляться под водой.
В Японии разработан проект подводного танкера. Несмотря на свои исполинские размеры - 242 м в длину и до 40 л в ширину- этот подводный корабль также будет иметь очень большую скорость - 40 уз. Для достижения такой скорости предполагается использовать атомную установку мощностью 335000 л. с.
Мощность атомной энергетической установки в 300000 л. с. тоже вполне достижима: американский атомный авианосец Энтерпрайз имеет двигатели мощностью до 312000 л. с. В последние годы в Англии, Италии, Японии, США и Швеции созданы десятки проектов подводных танкеров, рудовозов, комбинированных рудовозов-танкеров и даже пассажирских лайнеров. Но одно дело - перевозка руды, топлива и других грузов подводными судами, а другое - подъем тяжелых грузов с океанских глубин.
Вероятно, одной из серьезных проблем глубоководной промышленности явится разработка методов и средств для подъема со дна океана рудного и минерального сырья и его транспортировки на береговые предприятия. Задача создания промышленных средств для транспортировки тяжелых и сверхтяжелых грузов с больших глубин еще никогда не ставилась перед наукой и техникой. Единственным примером перемещения тяжелых грузов с морского дна может служить подъем затонувших судов. Несмотря на то, что подобные работы носят эпизодический характер и подъем судов производится лишь с небольших глубин, применяемые методы и средства должны бь1ть использованы при проектировании грузоподъемных средств промышленного назначения. Некоторых успехов в этой области техники достигли океанологи. При океанографических исследованиях они давно уже применяют средства для взятия и подъема различных проб, т. е. для подъема небольших грузов с больших глубин.
Таким образом, в наше время разработана техника для подъема больших грузов (затонувших судов) с малых глубин и малых грузов (например, проб грунта) с больших и даже предельных глубин океана, но пока еще отсутствуют средства для подъема больших грузов с больших глубин.
Одним из примеров подъема полезных ископаемых со дна океана служит использование землесосного снаряда, транспортирующего пульпу (воду, смешанную с рудой) по трубам наверх, в трюм транспортного судна. Как известно, этот способ очень широко применяется при землеройных, дноуглубительных и других работах. Разумеется, полезные ископаемые, находящиеся на океанском дне, должны быть предварительно раздроблены на мелкие куски. Но не всегда можно мельчить рудное или минеральное сырье. Весьма вероятно, что возникнет необходимость в подъеме со дна океана крупных образований и даже целых глыб руды или минерала. В этом случае потребуется другой способ транспортировки.
Никто не будет спорить, что для подъема (как и для спуска) грузов можно использовать всем известную лебедку, которая применяется не только при океанографических исследованиях, но и в самых различных областях промышленности.
Подобный способ прост и вполне применим при подъеме руды с относительно малых глубин, но едва ли он будет рационален для рудных карьеров, разрабатываемых на глубине в несколько километров. Для работы в океане придется построить очень крупные суда и установить на них мощные грузоподъемные устройства - лебедки с огромными барабанами, на которые нужно будет наматывать прочные канаты длиной в несколько тысяч метров. Поднимать груз и передавать его на рудовоз в штормовых условиях очень сложно. Времени на подъем небольшой порции руды уйдет много, а расход энергии окажется огромным. Следует также иметь в виду, что захват груза будет происходить вслепую в связи с расположением грейфера очень далеко от лебедки (усложняется автоматизация процесса).
Если вспомнить, что "привязанные" канатом к поверхности батисфера и гидростат уступили свое место глубоководному аппарату, то можно предположить и замену "привязанных" грузоподъемных средств автономными грузоподъемными судами.
В самом деле, нельзя ли для подъема грузов обойтись без шланга или троса и использовать силу плавучести понтона, как это делается при подъеме затонувших судов? Нельзя ли создать судно, которое бы ныряло вглубь, как ловец жемчуга, и, захватив на дне подготовленный груз, всплывало вверх, а затем отвозило тяжелые грузы - глыбы руды, базальта или другого материала - на береговую базу? Так мы с вами подошли к идее создания ныряющего грузоподъемного судна.
Вполне возможно, что по мере освоения сырьевых ресурсов дна океана "обычные" грузоподъемные устройства, существовавшие на протяжении многих веков, рано или поздно уступят место особой группе судов-автоматов, способных забирать подготовленные на дне грузы, всплывать с ними на поверхность, отвозить к берегу и разгружаться над самодвижущимся транспортером.
Не вдаваясь в подробности, можно рассказать о предполагаемом внешнем виде такого ныряющего судна, основных принципах его устройства и работы.
Впрочем, прежде чем начать наш рассказ о работе подобного судна, следует предположить, что специальные машины-автоматы, подобные сухопутным бульдозерам, грейферам, экскаваторам, уже выполнили на дне океана заданную им работу. Горы полезных ископаемых добыты землеройными машинами и подготовлены для подъема на поверхность. Руда раздроблена на куски, удобные для погрузки, и сосредоточена в виде длинных отвалов, напоминающих большие гряды.
Как уже было сказано, суда для подъема грузов со дна океана будут использовать силу положительной плавучести. Ясно, что удельный вес груженого судна должен быть меньше, чем у воды. Плавучесть ныряющего судна могут обеспечить пустые отсеки, которые, занимая объем верхней части корпуса судна, будут выполнять роль поплавков-понтонов. Эти балластные отсеки автоматически заполняются водой, и судно, теряя свою положительную плавучесть, уйдет под воду; когда же потребуется подняться на поверхность, из этих отсеков удалят воду.
Хорошо, - скажет читатель, - придать судну отрицательную плавучесть для погружения действительно очень просто. А как из цистерн откачивать воду перед всплытием, если на дне давление окружающей среды составит, например, 500 кгс/см2 и более. Ведь именно в этом и состоит особая сложность создания любых глубоководных аппаратов!
Инженеры предполагают использовать энергию пороховых зарядов. Для этого внутри корпуса надо установить очень прочные баллоны, способные выдерживать давление в несколько тысяч атмосфер. Внутри баллонов разместят пороховые заряды, которые будут поочередно и по мере необходимости воспламеняться электрической искрой.
После сгорания зарядов в баллонах образуется газ под высоким давлением, который и используется для продувки балластных цистерн точно так же, как сжатый воздух на подводных лодках.
Разумеется, судно должно быть оборудовано автоматически действующей системой управления плавучестью, которая в положенное время командует открытием кингстонов, воспламенением пороховых зарядов и пуском сжатого газа для продувания балластных цистерн.
При продувании балласта на больших глубинах могут использоваться регулируемые химические реакции или электролиз воды, образующие газ высокого давления.
Мы рассмотрели только один из возможных путей обеспечения положительной плавучести глубоководного судна, но каждому ясно, что это очень сложный вопрос и для его практического решения еще предстоит немало поработать.
Итак, характерной особенностью ныряющих судов должна быть способность быстро и автоматически менять свою плавучесть. Подойдя в тот район океана, где на дне лежат подготовленные для подъема грузы, суда заполнят балластные цистерны водой и быстро опустятся к месту погрузки. В момент подхода ко дну плавучесть должна быть почти нулевой: ведь судно должно резко снизить скорость погружения, чтобы успеть занять перед погрузкой соответствующее строго определенное положение и мягко сесть на дно. После погрузки автоматы дадут команду, сжатый воздух продует цистерны и судно вместе с грузом, став легче воды, оторвется от дна и начнет всплывать. В это время включатся главные двигатели и судно пойдет подводным ходом в порт.
В зависимости от характера груза и его расположения на дне ныряющие суда могут иметь различную конструкцию навалочного устройства. Одни из них могут иметь днища, напоминающие грейфер. Приближаясь ко дну, правая и левая части днища автоматически раскрываются. В таком положении судно "сядет" на груду подготовленной руды, а затем створки-челюсти начнут закрываться. Днище единым движением захватит груз и одновременно заполнит образовавшийся при закрытии трюм.
Могут быть суда с плоским дном и откидным бортом. В этом случае погрузка руды на судно будет, видимо, производиться навалочными машинами-бульдозерами из отвала руды, расположенной на дне соответствующим образом.
Теперь рассмотрим более подробно принцип работы и конструкцию ныряющего рудовоза.
На любой глубине внутри балластных цистерн давление всегда равно наружному, поэтому конструкции корпуса не испытывают напряжений от. силы давления окружающей воды.
Известно, что каждый кубический метр газа, заключенный в оболочку, в толще воды может поднять примерно 1 г груза (за вычетом, конечно, веса оболочки и газа). Ориентировочные расчеты показывают, что при этом условии "ныряющий рудовоз" длиной 95 м при ширине 14 м и высоте борта 12 м может иметь грузоподъемность около 5000 г. Будущим конструкторам ныряющих судов придется определить более точно, какие размерения должны иметь подводные суда-автоматы. Относительно малый вес "оболочки", т. е. порожнего судна, может быть достигнут применением высокопрочных, но в то же время легких металлов, стойких в морской воде.
Полная автоматизация судна, своеобразное назначение и тяжелые условия плавания на больших глубинах предъявляют особые требования к форме корпуса, общей конструкции и характеристикам судна.
На нашем рисунке изображен "ныряющий рудовоз" будущего. Это судно имеет сигарообразный корпус, напоминающий подводную лодку. Горизонтальной плоскостью судно как бы разделено на две части. Выше этой плоскости в корпусе судна находятся цистерны, обеспечивающие плавучесть, автоматизированная энергетическая установка, судовые устройства и системы автоматического управления. Вся нижняя часть судна является трюмом - вместилищем для груза. Трюм занимает всю длину судна и по килевой линии имеет разъем, причем обе его половины своей верхней кромкой шарнирно соединены с корпусом. При помощи мощных гидравлических приводов половины днища могут размыкаться и смыкаться. Смыкаясь, они образуют трюм полуцилиндрической формы.
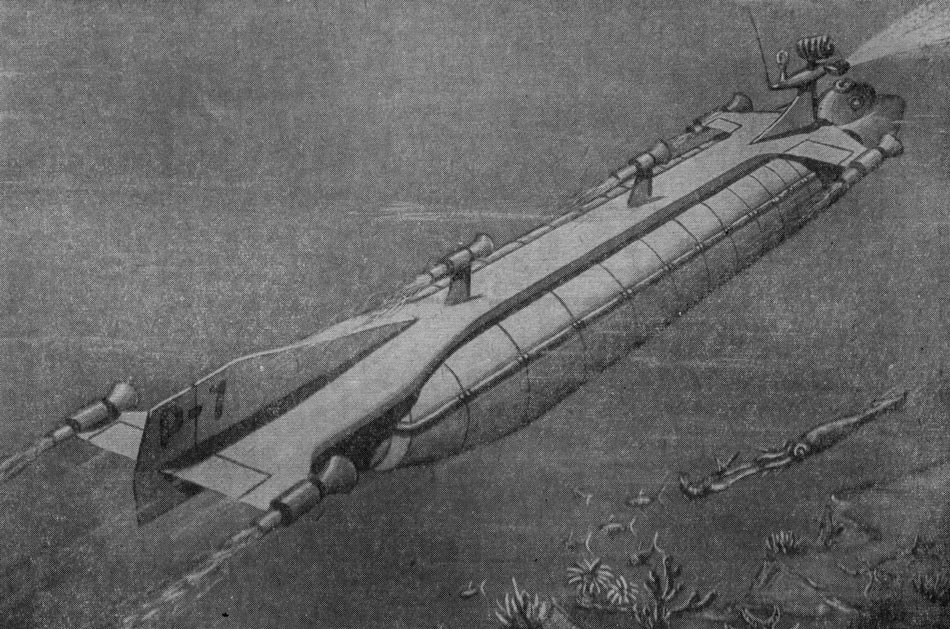
Ныряющий рудовоз
Палуба судна и верхняя часть бортов составляют единую цилиндрическую конструкцию. На полукруглой палубе в ее диаметральной плоскости установлен вертикальный стабилизатор, а впереди, ближе к носу, возвышается небольшая полусферическая прочная рубка с плотно задраенными люками.
С обоих бортов судна, к носу от рубки, установлено по два водометных движителя. Для поперечного перемещения судна, что очень важно при посадке на грунт в точно рассчитанном месте или при входе в канал, имеются два маневровых "подруливающих" водомета. Один из них находится в корме, а другой - в носу; эти водометы расположены поперек судна и могут создавать боковой упор на правый или левый борт.
Для управления судном имеются и поворотные рули. С каждого борта размещено по два руля глубины, а в корме, на обычном для каждого судна месте, установлен вертикальный руль поворота.
Энергетическая установка судна представляет малогабаритную, но мощную электростанцию, заключенную в прочный цилиндрический корпус. Разумеется, двигатель должен работать на ядерном горючем или на каком-либо ином топливе, для сгорания которого не требуется кислород. В другом отсеке прочного корпуса сосредоточены приборы автоматического управления судном. Все остальные судовые устройства - водометные движители, приводы рулей, механизмы закрытия трюма и т. д. - расположены вне прочного корпуса и работают в воде.
Напомним, что все детали судов и механизмов, находящихся в воде, должны обладать особо высокой стойкостью против разрушающего влияния морской воды; их движущиеся поверхности должны быть защищены от механических повреждений, попадания песка и других твердых частиц. Все конструкции механизмов и аппаратов, расположенных снаружи прочного корпуса, выполняются таким образом, чтобы их работе не мешало большое (и переменное) давление воды.
Управление всей работой рудовоза производится по программе, введенной в машину автоматического управления. Запрограммирован весь комплекс команд, подаваемых в строгой последовательности операций всем машинам и устройствам, обеспечивающим подводное движение рудовоза к руднику, его погружение на дно, погрузку руды, всплытие, возвращение в порт и разгрузку. Управляющая машина-автомат расположена в прочном корпусе и полностью изолирована от внешней среды, а ее связь с датчиками внешней информации и исполнительными органами, воздействующими на различные механизмы, осуществляется по электропроводам.
Управляющая машина состоит из блоков-автоматов, каждый из которых управляет определенной системой. Так, блок-автомат, управляющий ходом рудовоза, получает сигналы-импульсы от ультразвуковых датчиков.
При передвижении под водой авторулевой рудовоза будет ориентироваться по гидроакустическим маякам, поэтому снаружи должны быть смонтированы ультразвуковые приемники. В зависимости от полученной информации электронно-вычислительное устройство подаст команду на рулевой привод и подруливающие водометы и поведет рудовоз по заданному курсу. Регулируя частоту вращения движителей, система может остановить судно или изменить его скорость. При всплытии и маневрировании на рейде порта команды судну могут подаваться по радио.
Другой блок управляет энергетической установкой: изменяет мощность электростанции, регулирует режим работы двигателей и механизмов. Особая автоматическая система ведает регулированием плавучести. Имеется также блок-автомат, воздействующий на погрузочно-разгрузочные механизмы трюма, и т. д.
Каждый блок-автомат управляет определенной системой, но работа всех устройств должна происходить в строгой последовательности, поэтому согласованность действия всех систем осуществляется специальным координирующим центром по заданной программе.
Как же будет работать рудовоз-автомат? А вдруг изменение обстановки потребует немедленного изменения заданной программы?
Вся система управления судном является не только автоматической, но и самонастраивающейся, способной в случае изменения внешних условий изменить программу и сохранить наиболее выгодный режим работы того или иного устройства.
Система навигационных ультразвуковых маяков приведет судно в район глубоководного рудопромышленного предприятия. Здесь судно будет управляться с помощью сигналов местных (установленных на дне) маяков-ответчиков, которые, воздействуя на систему автоматического управления, заставят судно начать погружение. Откроются кингстоны и вода устремится внутрь цистерны. В то же время включится система ориентации посадки. Как современный самолет, ориентируясь по радиосигналам, осуществляет слепую посадку на бетонную площадку аэродрома, так и судно, "планируя" в глубину, может точно приземлиться в место, наиболее удобное для захвата подготовленного груза.
Теперь приводится в действие привод разъемного днища: его "челюсти" сжимаются, проникая в толщу руды и образуя под ней уже замкнутое днище судна. Смыкание днища происходит не плавным, а вибрирующим движением, что обеспечивает проникновение "челюстей" в толщу руды.
Работа по захвату груза может производиться за счет гидростатического давления окружающей воды. Для этой цели внутри цистерн следует установить прочные пустотелые шары, соединенные трубками с гидравлическим приводом разъемного днища. Если судно находится на поверхности-шары пустые. Но оказавшись на большой глубине, шары превращаются в своеобразные аккумуляторы энергии. Если открыть клапаны, то окружающая вода под давлением 500-1000 кгс/см2 (в зависимости от глубины) будет стремиться проникнуть в полые шары-цистерны, попутно производя необходимую работу в поршнях гидропривода, закрывающего правую и левую половины днища судна.
Когда днище закроется и трюм окажется заполненным рудой, вступает в действие система плавучести, начинают работать ходовые движители и включается автоматическая система управления судовождением. Судно берет курс на береговую базу, и, набирая ход, быстро движется в порт для разгрузки.
Здесь при необходимости обслуживающий персонал может осмотреть механизмы, пополнить запасы горючего, провести предупредительный ремонт и устранить неполадки. Если разгрузившийся рудовоз не нуждается в пополнении горючим, ремонте или наладке, то об этом сообщается на специальный пульт сигнализации и подается команда на включение механизмов, закрывающих днище; судно-автомат выходит из канала и, развернувшись, вновь уходит на рудник.
Для того, чтобы подобное судно могло длительное время работать без вмешательства человека, необходимо обеспечить особую надежность и выносливость всех его устройств. Безотказность действия автоматов гарантируется не только их особой конструкцией, но и дублированием: если какой-нибудь прибор или механизм выйдет из строя, вместо него автоматически включится резервный.
О принципиальной возможности создания автоматики для управления ныряющим судном, пожалуй, нечего и говорить. На наших глазах в космосе происходят настоящие чудеса из области автоматики и телеуправления. На этом фоне достижения из других областей техники, например, автоматизация посадки сверхзвукового тяжелого самолета на палубу движущегося с большой скоростью авианосца, не производит особого впечатления.
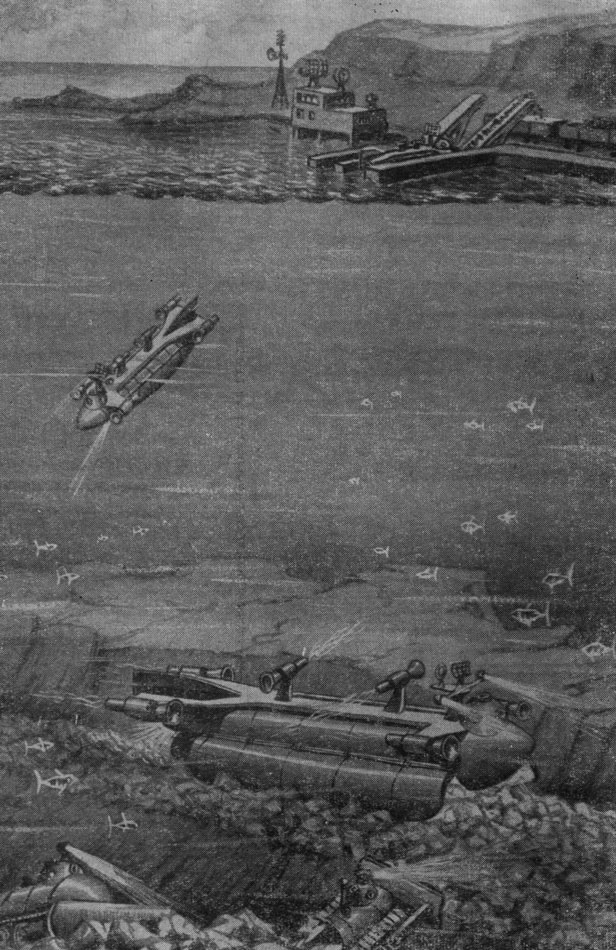
Рудник на дне океана
На морском транспорте условия и скорости совсем иные; здесь роль и успехи автоматики пока гораздо скромнее. Но уже строятся суда-автоматы. Разработаны автоматические системы программного управления дизельным судном. Такое судно-автомат без всякого вмешательства человека может совершать рейсы продолжительностью свыше 30 суток. По сообщениям зарубежной печати, в иностранных флотах ведутся большие работы по автоматизации боевых подводных лодок, для которых проблема "освобождения от экипажа" имеет особое значение.
Кстати сказать, первые шаги на этом пути были сделаны моделистами-любителями, которые уже давно обходятся без экипажа на своих маленьких судах, в том числе и на погружающихся моделях подводных лодок. Наконец, еще раз напомним о создании батискафов-автоматов! Все это убеждает в полной реальности многих, казалось бы фантастических, проектов подводных судов для мирных целей.
Ныряющие суда, одним из представителей которых является описанный выше рудовоз, могут применяться для подъема и доставки на берег или надводную базу любых грузов, в том числе требующих ремонта глубоководных машин, различных конструкций, сооружений, оборудования и т. п. В каждом отдельном случае вместо разъемного створчатого дна суда будут иметь специальные захваты.
Кроме подъема и транспортировки грузов с морских глубин, ныряющие суда станут использовать и для добычи рудных образований - конкреций, свободно лежащих на дне океана. Если тот же ныряющий рудовоз будет иметь добывающую установку, то он сможет сам собирать рудные конкреции с поверхности дна, заполнять ими свой трюм и отвозить руду в порт. В этом случае ныряющий рудовоз станет не только подъемно-транспортным, но и добывающим судном.
Попытаемся представить, как на больших глубинах будет происходить сбор образований без участия человека. Очевидно, наш: рудовоз должен двигаться в непосредственной близости от дна. Специальные гидроакустические приборы будут производить поиск наиболее плотных скоплений конкреций и корректировать движение судна. При обнаружении продуктивных залежей конкреций автоматически включится добывающее устройство, расположенное в передней части днища. Заработают моторы гидрорыхлителей и мощные струи воды с силой ударят по дну. Как раз над скоплениями конкреций будут находиться всасывающие устья, через которые мощные насосы, подобно пылесосам, засосут их вместе с водой и перекачают пульпу в трюм рудовоза.
Всасывающие устья находятся в непосредственной близости от грунта и представляют протяженные щели, расположенные в одну линию поперек судна. Поэтому после прохождения рудовоза над дном за его кормой останется широкая полоса, очищенная от рудных образований.
Попадая в трюм, конкреции будут осаждаться на днище, а легкие частицы ила или песка, взвешенные в воде, через верхние шпигаты уйдут за борт.
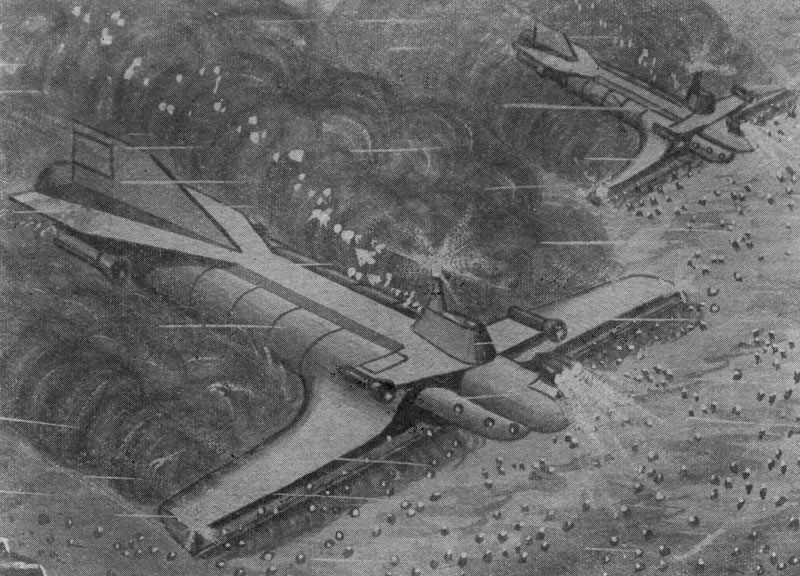
Сбор железомарганцевых конкреций
По мере наполнения трюма грузом вес судна будет постепенно увеличиваться, поэтому автоматически действующая система управления должна все время поддерживать нулевую плавучесть, необходимую для движения судна на определенном расстоянии от дна.
Как только трюм заполнится грузом, по команде автоматов включаются гидрорыхлители и всасывающие насосы, сжатый газ продует цистерны и рудовоз оторвется от грунта. Ходовые двигатели разовьют полную мощность, и судно направится в порт.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'