4.2. Орудия лова и их взаимодействие с промысловыми объектами
С точки зрения подводного технолога орудия лова промысловых объектов представляют собой специализированные подводные аппараты. Общей структуре подводных аппаратов лучше всего отвечают разноглубинные и донные тралы. Как и другие виды необитаемых подводных аппаратов [38], они имеют пульт управления, расположенный на судне обеспечения (в данном случае на промысловом), буксирно-кабельную и забортную части. В последней можно выделить рабочий орган (собственно трал) и аппаратуру внешней информации. Установленные на трале приборы контролируют глубину хода, расстояние до грунта, раскрытие трала, степень наполнения рыбой, температуру воды. Контроль параметров орудия лова осуществляется либо по кабельному каналу связи, либо по гидроакустическому.
Конструкции других видов орудий лова могут значительно отклоняться от указанной схемы. Помимо конструкции рабочего органа наибольшее разнообразие технических решений наблюдается в деталях, соединяющих его с промысловым судном. Эти устройства в ряде случаев не только сообщают движение подводному аппарату, но и служат для транспортировки уловленных организмов на борт судна. У неподвижных орудий лова, например насосных, транспортировочная функция соединительной части является основной.
Ниже рассматриваются вопросы, связанные с функционированием рабочих органов орудий лова, которые в соответствии с установившейся в рыбохозяйственной практике терминологией в дальнейшем будем называть просто "орудиями лова". Возможно несколько вариантов классификации орудий лова [29, 39, 57]. На рис. 4.4 приведена классификация, основанная на результатах анализа зон действия (влияния) орудий лова и цикла их работы [39].
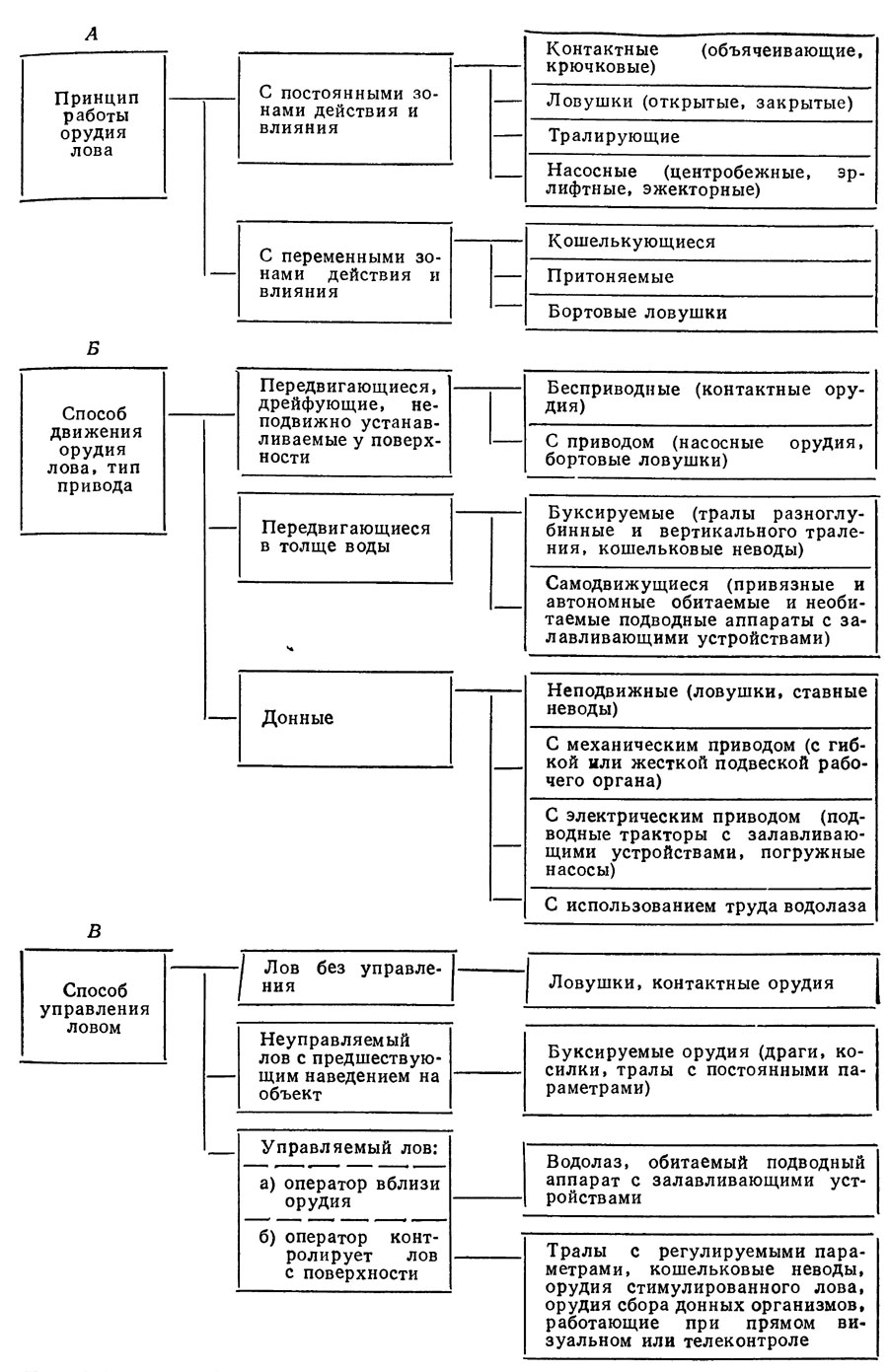
Рис. 4.4. Классификация орудий лова, выполненная на основе анализа принципа работы орудий (А), способа движения (Б) и способа управления орудиями (В)
Специальной функцией орудий лова является взаимодействие со скоплениями промысловых организмов. Оно осуществляется во времени и пространстве по определенному циклу, свойственному каждому виду орудия. Наиболее характерный цикл работы орудия лова показан на рис. 4.5. Как можно видеть, в сферу задач подводной технологии непосредственно входят только рабочие операции и подъем на поверхность. Рабочие операции для подвижных орудий - это обеспечение их движения с определенной скоростью в заданном направлении, для неподвижных - управление их работой или управление поведением объектов в зоне действия орудий [56]. Именно эти операции определяют основной принцип работы орудия лова, т. е. тип его взаимодействия со скоплениями промысловых организмов.
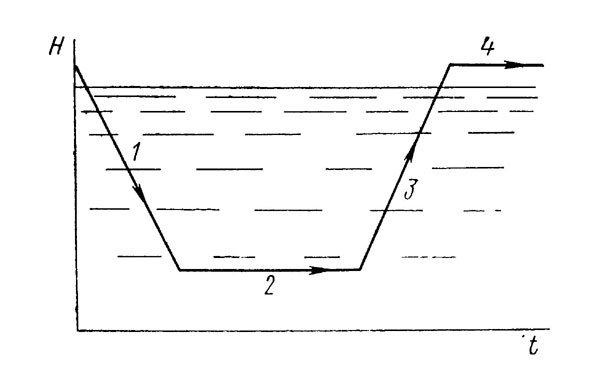
Рис. 4.5. Цикл работы орудия лова. 1 - спуск под воду; 2 - рабочая операция; 3 - подъем; 4 - разгрузка улова
Если все операции, связанные с процессом лова, производятся последовательно, то время одного цикла составит

(4.10)
где t1, t2, t3, t4 -время выполнения отдельной операции.
Время выполнения подвижным орудием лова одной операции определяется по формуле
(4.11)
где L - длина пути (горизонтального или вертикального); υ - средняя скорость.
Орудия лова работают по двум принципиально отличающимся схемам (рис. 4.6). По первой работают орудия, у которых рабочая операция выполняется "открытым" способом (контактные, тралящие, насосные орудия). В процессе работы эти орудия имеют постоянную зону действия. По второй схеме работают орудия лова, у которых рабочая операция выполняется по "замкнутому" способу (кошельковые и закидные невода, бортовые ловушки).
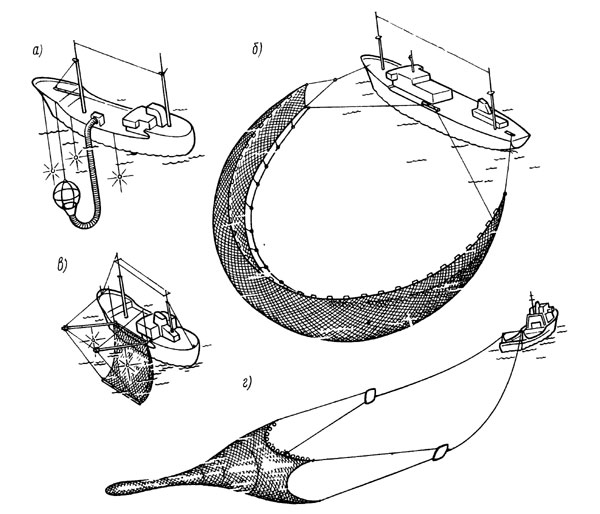
Рис. 4.6. Некоторые способы лова в открытом море: а - рыбонасосом на свет; б - кошельковым неводом; в - бортовой подъемной ловушкой; г - пелагическим тралом
Одним из основных путей совершенствования технологических операций является обеспечение непрерывного режима работы оборудования. Однако по непрерывному способу могут работать только орудия лова с "открытой" рабочей операцией. При этом возможны три варианта (рис. 4.7): в двух первых рабочая операция осуществляется непрерывно, тогда, как подача улова производится либо периодически, либо непрерывно; в третьем непрерывность достигается за счет последовательного использования нескольких рабочих органов, каждый из которых работает по периодическому циклу. Орудия лова с "замкнутой" рабочей операцией после ее завершения должны быть возвращены в исходное положение, поэтому они не могут осуществлять рабочую операцию непрерывно.
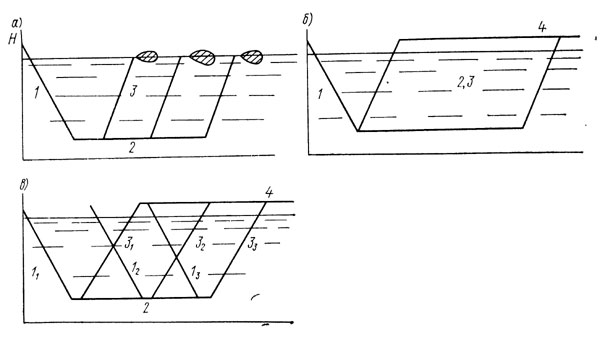
Рис. 4.7. Графики работы орудий лова: а - с непрерывным осуществлением рабочей операции и периодической подачей улова; б - то же, но с непрерывной подачей улова; в - с последовательным использованием нескольких рабочих органов. 1 - спуск; 2 - рабочая операция; 3 - подъем; 4 - разгрузка улова
Вокруг работающего орудия лова создается несколько зон, отличающихся друг от друга характером и степенью воздействия на промысловые объекты [39]. Под зоной влияния понимается пространство, в котором проявляется воздействие на промысловые объекты полей, создаваемых орудиями лова, в результате чего поведение промысловых объектов меняется. В зависимости от природы поля это влияние может носить отпугивающий или привлекающий характер. Очевидно, что привлекающие поля дополняют и расширяют возможности орудий лова, увеличивают их эффективность. Под зоной действия понимается пространство, в котором проявляется действие полей орудия лова на промысловые объекты, в результате чего происходит их улавливание. Для выполнения этой операции необходимо обеспечить относительное движение объекта и орудия лова. Улавливающее действие орудий лова, как и любой процесс, происходит в пространстве и времени и определяется принципом работы орудия лова. Под зоной удерживания понимается пространство, в котором проявляется удерживающая способность орудия лова.
Взаимное расположение зон зависит от типа орудий лова. Как правило, зона влияния и поля влияния располагаются перед зоной действия орудия лова. Зона удерживания у тралящих орудий, ловушек и насосных орудий располагается за зоной действия. У контактных орудий лова (крючковые и объячеивающие) зона действия и зона удерживания совпадают. Поле влияния, созданное искусственным путем, как правило, больше зоны влияния и зоны действия. Размер поля влияния зависит от силы раздражителя и от характера его распределения в водной среде. Физическое поле, источником которого служит непосредственно орудие лова или средства интенсификации промысла, можно рассматривать как поле сигнала, а поля, образованные другими источниками, - как поле шумов. Зона действия источника поля, в свою очередь, подразделяется на ряд зон. Так, если рассматривать зону действия в связи с биологической значимостью раздражителя, то в самом общем случае по мере удаления от источника поля следует выделить зоны безусловной реакции, условной реакции, ориентировочной реакции и зону обнаружения. В зависимости от вида реакций, вызываемых физическим полем, различают участки допороговых, пороговых, нормальных, максимальных и сверхсильных раздражений. Исходя из задач управления ловом физические поля орудий лова и средств интенсификации промысла можно разбить на зоны управляющих, нейтральных и отрицательных воздействий. Наличие зон управляющих и неуправляющих воздействий и положение их границ зависит от параметров физического поля, вида орудия и техники лова, относительного расположения орудия лова и физических полей, особенностей распределения и состояния промысловых организмов, условий внешней среды и ряда других причин.
В процессе лова размеры и форма зон управляющих и неуправляющих воздействий могут изменяться, поэтому делить поле на зоны и участки необходимо не только в пространстве, но и во времени. Разбивка поля по пространственному признаку позволяет установить функции отдельных его участков, наметить пути улучшения качества поля, изменяя параметры и распределение орудий лова и средств интенсификации промысла, технику и организацию лова. Общая методика определения размеров зон и участков физических полей разработана В. Н. Мельниковым [31].
Поля орудий лова взаимодействуют со скоплениями организмов, распределенными в водной толще или на поверхности дна. Само водное пространство и находящиеся в нем промысловые объекты, как правило, постоянно движутся. Распределение и поведение скоплений организмов, их размеры и концентрация зависят от многочисленных факторов биологического и гидрологического характера и меняются по времени. В обобщенном виде количество объектов в улове N является функцией концентрации промысловых объектов δ, пространства Q, в котором они распределены, и абсолютного коэффициента уловистости γ:

(4.12)
Последний наиболее просто и в то же время точно определяется для тралирующих орудий лова, если известны данные об абсолютной плотности организмов на пути трала (полученные, например, с помощью притралового фотоавтомата):

(4.13)
или

(4.14)
где S и V - размеры зоны облова в единицах площади или объема, δs и δv - плотность скопления на единицу площади или объема.
В общем случае абсолютный коэффициент уловистости можно выразить функцией
(4.15)
где η - коэффициент, отражающий уловистость в зависимости от способа лова и режима применения орудия лова, ω - коэффициент, связывающий уловистость с поведением объекта в процессе лова. При лове неподвижных и малоподвижных объектов выражение (4.15) упрощается: γ = f(η).
Для практического определения абсолютного коэффициента уловистости воспользуемся выражением
(4.16)
где N0 - количество объектов в зоне влияния орудия лова. Из всех объектов, находящихся в зоне влияния, улавливается только некоторая часть N1, другая часть N2 может выйти из этой зоны. Из зоны удерживания орудия лова также может выйти часть объектов N3. Таким образом, улов будет определяться формулой

(4.17)
Разделив это выражение на N0, получим формулу для абсолютного коэффициента уловистости

(4.18)
Если количество объектов, выходящих из зоны действия орудия лова и зоны его удерживания, стремится к нулю, получим γ = N/N0 = 1. Следует обратить особое внимание на то, что, хотя при γ=1 орудие лова работает с максимальным КПД, такой случай можно считать идеальным только с технической точки зрения. Высокая уловистость обязательно должна сочетаться с высоким уровнем другой важной промысловой характеристики - селективности (избирательности).
Селективность позволяет избежать лова непромысловых объектов. Она достигается несколькими способами. Прежде всего - это правильный выбор времени и места лова. Возможно применение различных физических полей, отпугивающих одни виды (возрастные группы) животных и привлекающих другие. Наконец, селективность обеспечивают чисто механическими способами - например, выбором размера ячей трала. Наиболее изучена селективность сетных орудий [57]. Данных о селективности других типов орудий лова очень немного. Поэтому большой интерес представляют результаты детального анализа работы гребешковой драги, выполненного Чапманом и др. Авторы определили, что кривая селективности драги имеет необычный характер (рис. 4.8): с увеличением размеров гребешков вероятность их поимки вначале возрастает, а затем, начиная с определенного размера, быстро падает. Это показывает, что общая селективность драги определяется не только селективностью ее элементов, но и какими-то другими факторами [71]. По мнению авторов, эмпирическая кривая селективности драги может быть интерпретирована следующим образом. Селективность зубьев и сетного мешка драги описывается обычной для сетных орудий кривой (пунктирная линия на рис. 4.8). Если бы селекция этого типа была единственным фактором, эффективность лова крупных гребешков оказалась бы равной 100%. Однако общая селективность ограничивается другим фактором (штриховая линия на рис. 4.8), природу которого раскрыли водолазы. Они показали, что при движении драги перед ее зубьями образуется валик из грунта, ракушек и т. п., затрудняющий попадание в драгу животных. При этом вероятность поимки крупных гребешков, более глубоко погруженных в грунт, меньше, чем находящихся поблизости гребешков среднего размера.
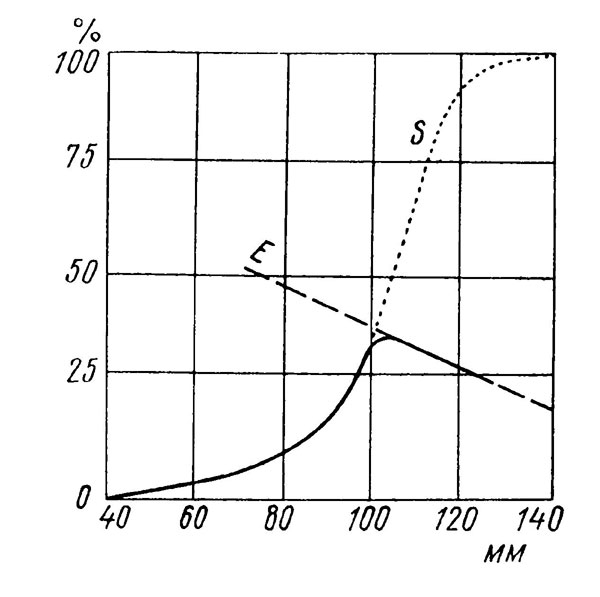
Рис. 4.8. График общей селективности стандартной гребешковой драги, определяемой селективностью зубьев и сетного мешка, а также эффективностью захвата
Результаты, полученные шотландскими исследователями, можно использовать при анализе работы орудий лова разных типов, когда селективность определяется комплексом факторов. (Селективность водолазного промысла будет рассмотрена нами в разделе, посвященном этому методу лова.)
Значительный интерес представляет вопрос о влиянии работы орудия лова на окружающую среду и выживаемость организмов, взаимодействующих с орудиями лова, но не уловленных ими. Этот показатель позволяет оценить целесообразность тех или иных мероприятий, направленных на улучшение промысловых характеристик и повышение селективности. Установлено, что большинство рыб, уходящих через ячею трала, остаются невредимыми или получают незначительные повреждения [57]. Донный трал улавливает значительное количество непромысловых животных и, хотя почти весь "прилов" выпускается после разбора улова обратно в море, большинство этих организмов (прикрепленные формы) обречены на гибель; многие другие сильно повреждаются и тоже погибают. Особенно большой вред траловый лов наносит в периоды нереста, нагула молоди, когда вместе с нерестующими производителями уничтожается нерестовый субстрат и отложенная на нем икра.
Очень большой ущерб донным животным наносит промысел водорослей. Так, в Японском море при драгировании анфельции уничтожается огромное число обитающих на ней животных, в том числе и молодь промысловых видов. Канадские ученые провели исследование влияния на популяцию омаров промысла драгами водоросли хондрус (ирландский мох). Было установлено, что убытки от драгирования в результате гибели омаров составляют 18 % стоимости добытых водорослей (или 7 % стоимости добытых омаров за сезон).
В основе совершенствования существующей техники, технологии рыболовства и разработки новых приемов лова лежат данные о поведении промысловых объектов в зоне действия орудий лова. К настоящему времени накоплен значительный материал по поведению рыб в зоне облова орудиями разных типов: ставных неводов, ловушек, насосных орудий и др.
Изучение взаимодействия орудий лова с промысловыми объектами целесообразно проводить в два этапа. На первом оценивается общий характер влияния работающего орудия на поведение промысловых объектов, определяются основные раздражители. На втором этапе проводится экспериментирование над самим орудием лова: направленно изменяют конструкцию и характеристики отдельных элементов орудия лова, усиливают или ослабляют раздражители и т. п. Натурные исследования взаимодействия промысловых объектов с орудием лова - очень ответственная и сложная работа; только продуманная организация эксперимента и комплексный подход к решению задачи может привести к практически значительным результатам [62].
Наиболее полно изучено поведение рыб в зоне действия тралирующих орудий лова. Современные тралы - это сложные инженерные сооружения. Трудности, возникающие при их расчете и проектировании, связаны как с поведением трала - будучи гибкой системой, он под действием различных факторов меняет в процессе работы свою форму, - так и с поведением промысловых объектов, которое носит очень сложный характер. По выражению основоположника науки о промышленном рыболовстве Ф. И. Баранова: "Проблема трала упирается и перерастает в проблему поведения промысловых рыб".
При исследовании взаимодействия тралирующих орудий и объектов лова используются фото-, кино- и телеустановки, гидроакустические устройства, подводные аппараты. Наиболее простым и надежным аппаратом для визуальных наблюдений за тралом является буксируемый обитаемый аппарат типа "Атлант". Его основные достоинства - быстрота вывода на трал, возможность приближения к тралу вплоть до полного контакта с ним, относительная неподвижность наблюдателя по отношению к орудию лова, возможность проводить длительные наблюдения. С помощью таких аппаратов были проведены многочисленные эксперименты в натурных условиях и получены данные по оптимальным конструкциям отдельных узлов и деталей трала, форме сетного полотна, оснастки и остропки. Результаты этих исследований легли в основу решений многих проблем технологии тралового лова. В частности, удалось изучить характерные реакции рыб разных видов на отдельных участках (зонах) траловой системы [25].
Зона А (район траловых досок). Комплекс раздражителей (турбулентный шлейф, разнообразные звуки высоких частот), создаваемых досками, вызывает у рыб оборонительную реакцию. На характер поведения некоторых рыб большое влияние оказывает участок троса (ваера), идущий впереди доски. Рыбы из разреженных скоплений, находящиеся с внутренней стороны ваеров, как правило, попадают в зону облова. Стайные рыбы обычно стремятся уйти в ту сторону от ваера, в которой осталась основная масса рыбы. Донные рыбы практически не реагируют на ваер, а от доски уходят, когда до нее остается 2-3 м.
Зона Б (от траловой доски до начала крыльев трала). В этом районе рыба как бы аккумулирует воспринимаемые ею разнообразные раздражители, вызванные движущимся тралом. Рыбы, оказавшиеся в пространстве между распорными досками, под влиянием тросов (кабелей) и турбулентного шлейфа концентрируются на сравнительно узком участке. Особенно велика при этом роль турбулентных шлейфов. Донные и придонные рыбы не уходят из облавливаемой зоны над шлейфом. Пелагические рыбы, находящиеся в момент облова около грунта, также избегают входить в мутьевой шлейф, хотя и наблюдались случаи выхода таких рыб над шлейфом.
Зона В (от начала крыльев до конца сквера). В районе устья рыбы, как правило, ориентированы в сторону трала и сконцентрированы в большей степени, чем вне зоны облова. Здесь наблюдаются в основном две характерные реакции рыб: одни стаи быстро проскакивают в мотенную часть трала, другие резко разворачиваются и начинают плыть по направлению его движения. Рыбы держатся на определенном расстоянии (0,3- 0,5 м) от сетного полотна и не предпринимают серьезных попыток хода через ячею. Можно предположить, что этому препятствуют турбулентный след и зона повышенного давления вблизи сетного полотна.
Зона Г (от сквера до тралового мешка). Поведение рыб в этой зоне различно. Так, движение сардины, ставриды и скумбрии становятся беспорядочными, теряется чувство стайности (стая "рассыпается"). Часть рыбы проходит в траловый мешок, часть стремится выйти из трала через ячею сетного полотна, а остальные разворачиваются и ориентируются к устью трала. При движении на выход из трала у рыб снова появляется чувство стайности, и они организованно движутся в направлении движения трала. При этом рыбы не пытаются выходить через ячею, даже находясь вблизи прорывов сетного полотна площадью около 1 м2.
Зона Д (траловый мешок). Здесь наблюдаются два вида движения рыб. Если рыбы ориентированы против движения трала или под углом к нему, они с большой скоростью проскакивают в куток.
Выход рыб через ячею в разных зонах трала подробно исследовался с помощью мелкоячеистых покрытий, установленных на трале, и подводных наблюдений. Показана зависимость числа уходящих рыб от видового состава, размера ячеи и окраски, полотна. На основании результатов этих исследований были рекомендованы оптимальный размер ячеи сети и ее цвет [57].
Уловистость тралов и кошельковых неводов находится в тесной связи с реакцией рыбы на орудие лова, ее крейсерской и бросковой скоростью, а также скоростной выносливостью, зависящей от размеров рыб и запаса энергии. Используя скоростную выносливость рыб в качестве критерия, можно выбрать оптимальные параметры траловой системы для успешного облова косяков пелагических рыб определенной длины [33].
Учитывая особенности поведения рыб в процессе их лова тралирующими орудиями, выявленные многочисленными подводными наблюдениями [25 и др.], запишем условие, при котором рыба, оказавшаяся в узкой цилиндрической части трала, не сможет выйти из него:
(4.19)
где sp - путь, пройденный рыбой; sT - путь, пройденный тралом; L - длина трала от устья до цилиндрической части.
Можно показать, что оптимальная длина трала связана с параметрами облавливаемых рыб соотношением [33]

(4.20)
где υT - скорость трала, lр - длина рыбы, f - максимальная для данного вида частота колебаний хвостового плавника.
Конкретную реакцию рыбы на движение трала очень трудно выразить количественно, тем более что поведение разных видов в процессе лова чрезвычайно изменчиво. Поэтому представляется весьма плодотворным использовать теории, учитывающие обобщенные биологические характеристики объекта лова. Если исходить из предположения, что интенсивность ухода облавливаемого объекта от трала определяется его биологическими особенностями, внешними условиями и расстоянием от сетной поверхности трала, то общий улов трала с круговым устьем можно выразить простой зависимостью

(4.21)
где δ - плотность распределения объекта на единицу объема, R - радиус устья, h1 - ширина периферийного кольца устья, из которого объект лова полностью уходит из трала; h2 - ширина кольца, из которого объект лова уходит частично;
Для трала с прямоугольным устьем

(4.22)
где L и Н - соответственно ширина и высота устья.
Входящие в эти выражения три неизвестные величины δ, h1 и h2 легко определяются экспериментальным путем. Для этого достаточно провести одновременное траление тремя тралами, различающимися лишь размером устья [2].
Один из основных путей повышения эффективности рыболовства - совершенствование способов управления поведением промысловых объектов в процессе лова. Под управлением объектом лова понимается такое воздействие на его поведение путем сообщения ему управляющей информации или уменьшения вредного влияния неуправляющей информации, при котором повышается эффективность промысла [32]. По способу передачи информации различают контактное управление (непосредственное соприкосновение объекта лова с элементами орудия лова) и неконтактное - с действиями на объект лова физических полей, образованных орудиями лова или специальными устройствами. По биологической эффективности можно выделить управление, основанное на принципе энергетического взаимодействия или на принципе собственно информационного взаимодействия. Для управления движением рыб используются физические поля различной природы. Важнейшими из них являются световые, акустические и электрические. Наиболее широко применяются оптические поля. Реакция рыб на сетное полотно и на отдельные элементы орудия лова определяется видимостью последних. Поэтому подводная освещенность и, в частности, время лова имеют большое значение. Те же цели преследует окраска элементов орудий лова, обеспечивающая максимальную заметность одних элементов и возможную невидимость других.
Очень важная черта поведения рыб - безусловно рефлекторное движение в движущемся зрительном поле (оптомоторная реакция). Эта реакция в значительной степени определяет описанные выше особенности поведения рыб внутри трала и неоднократно отмеченные подводными наблюдателями случаи следования рыб за тралом снаружи сетного мешка. Оптомоторные реакции рыб необходимо учитывать в первую очередь при совершенствовании тралового промысла. Предложено, например, использовать стробоскопический эффект, создаваемый в сетном полотне трала с помощью источников импульсного света, в результате чего рыба не замечает движения трала. В одном из устройств по оси трала перемещается специальное оптомоторное тело, которое во время траления со скоростью 0,1 - 1,0 м/мин вводят вглубь трала, вплоть до кутка, а затем в сложенном виде быстро перемещают к устью трала, после чего цикл повторяется. В другом варианте предложено использовать несколько оптомоторных тел, закрепленных на буксируемой за судном раме. После того как за оптомоторными телами скапливается достаточное количество рыбы, рама складывается и рыба облавливается тралом. Оптомоторные реакции можно использовать для повышения уловистости и других орудий лова. Так, предложено снабжать рыбонасос прозрачной трубой, внутри которой перемещаются черно-белые полосы. Следуя за ними, рыба направляется к залавливающему устройству. Видимость определяет реакцию рыб и на действие таких устройств, как воздушно-пузырьковые завесы, все шире используемые в рыбном хозяйстве.
Один из перспективных путей управления поведением стайных рыб - использование их активной реакции на хищника. Например, разработаны электронные имитаторы звуков, издаваемых различными хищниками. Разрабатываются приемы, основанные на комплексном действии различных сигналов. Уже используются комбинации электрических полей со светом при безсетевом лове и электрических полей со звуковыми для отпугивания рыб.
Конструкции орудий лова рыбы и пелагических беспозвоночных, их технологические характеристики подробно описаны в специальных руководствах и поэтому здесь не рассматриваются. Кратко остановимся только на идее создания обитаемых подводных траулеров, неоднократно выдвигавшейся в разное время. Главным преимуществом подводного тралирования считается его маневренность и возможность непосредственного визуального контроля за процессом лова. Важнейший недостаток такого метода лова состоит в том, что при тралировании с короткими ваерами траулер будет распугивать рыбу, при удлинении же ваеров система теряет основное достоинство - маневренность. Система подводный траулер - трал будет обладать и другими крупными недостатками: небольшие по сравнению с надводными судами размеры буксируемого трала, а, следовательно, низкая производительность и невозможность лова ряда видов рыб, например сельди; невозможность вести работы на глубинах, доступных современным тралам; высокая стоимость промысла. Все это делает вопрос о создании подводных траулеров, несмотря на кажущуюся заманчивость такой идеи, крайне проблематичным.
Анализ тенденций развития тралового промысла показывает, что он идет не по пути создания маневренных обитаемых подводных траулеров, а по пути совершенствования характеристик трала как специализированного подводного аппарата. Буксирование тралов подводными буксировщиками используется в тех случаях, когда основным требованием является не величина улова, а возможность селективного сбора биологического материала или когда работа ведется в местах, недоступных для управляемых с поверхности средств. В практике используется несколько конструкций планктонных тралов, установленных на подводных буксировщиках.
Трудности организации технологии добычи рыбы подводными траулерами ни в коем случае не означают отказа от использования орудий лова, устанавливаемых на обитаемых и необитаемых подводных аппаратах. Состояние мирового рыболовства настоятельно требует создания технических средств, позволяющих использовать новые районы промысла. Весьма перспективными в этом отношении являются северные моря. Располагая значительными запасами рыбы, они в то же время полностью или частично недоступны для традиционного промысла, базирующегося на надводных средствах обеспечения. В этих условиях единственный возможный путь - разработка методов чисто подводного промысла. Сейчас трудно сказать, как конкретно будет выглядеть такой промысел. По-видимому, подводные добывающие суда будут располагать мощными орудиями стимулированного лова. Такое судно, как уже отмечалось, с промысловой точки зрения является специализированным орудием лова. Совмещение в одном устройстве нескольких функций - залавливания, транспортирования и управления ловом - прогрессивный прием, значительно упрощающий технологию промысла. С технической точки зрения постройка подводных добывающих судов уже сейчас вполне реальна. В то же время в связи с тем, что технология чисто подводного промысла совершенно не отработана, необходима интенсивная и длительная работа по проектированию таких аппаратов, которую необходимо начинать безотлагательно.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'