Чем опасен дифферент при подъеме?
Прежде всего установим, почему возникает дифферент при подъеме затонувшей подводной лодки. Ранее мы уже выяснили, что лодка может плавать без крена и дифферента при соблюдении ею условий равновесия (3)-(4). Эти условия справедливы и при плавании лодки с дифферентом, если второе уравнение записать в общем виде:

Тогда угол дифферента

При xc=xg tg φ=0, т. е. лодка плавает без дифферента.
Уравнение (17) будет справедливым и при подъеме подводной лодки, если заменить координаты сил тяжести на координаты подъемного веса, а координаты сил плавучести - на координаты точки приложения подъемных усилий. Отсюда следует, что для подъема лодки без дифферента необходимо приложить подъемные усилия на одной вертикали с подъемным весом. Получить такое распределение можно, используя равенство моментов подъемных усилий в носовой QH и кормовой QK оконечностях лодки относительно линии действия подъемной силы Pпод;
Схема распределения подъемных усилий по длине лодки
где lк и lн - плечи сил Qк и Qн.
На первый взгляд кажется, что условие (18) очень простое, но выполнить его на практике обычно не удается.
Во-первых, как мы уже выяснили, подъемный вес лодки и особенно его координаты точно рассчитать невозможно, а следовательно, величины lк и lн могут быть известны только приблизительно.
Во-вторых, в первоначальный момент подъема необходимо приложить усилия (Qн+Qк) больше подъемного веса на величину отрывного сопротивления, которая тоже точно неизвестна.
Таким образом, хотя величину и точки приложения подъемных усилий мы назначаем сами, их фактические значения в ходе подъема неизвестны, и поэтому после отрыва от грунта лодка почти всегда всплывает с дифферентом. Исключение составляют те случаи, когда ее поднимают плавучими кранами или судоподъемными судами. Тогда дифферент можно регулировать путем выбирания или потравления гиней. Но и здесь фактические нагрузки на гини могут не совпадать с расчетными.
Рассмотрим теперь, чем же опасен дифферент? Ранее было сказано, что подъемный вес определяется количеством воды, влившейся в отсеки прочного корпуса и цистерны. Так как они обычно затапливаются не полностью, при дифференте вода смещается в сторону более погруженной оконечности. В ту же сторону смещается и точка приложения подъемного веса. Следовательно, изменяются расстояния lк и lн и возрастает нагрузка на подъемные стропы, расположенные в этой оконечности. В результате перенапряжения стропы могут разорваться.
Кроме того, подъемные стропы нередко соскальзывают в сторону всплывающей оконечности. Такие случаи встречаются в судоподъемных работах достаточно часто и приводят к авариям.
Предельное значение дифферента во время подъема устанавливают уже при проектировании судоподъемных работ. В зависимости от способов ограничения угла статического дифферента различают следующие типы подъемов:
- непосредственный подъем на поверхность;
- ступенчатый;
- зигзагообразный;
- неуправляемый бесступенчатый;
- управляемый бесступенчатый подъем.
Непосредственный подъем на поверхность затонувших подводных лодок осуществляют с небольших глубин. Дифферент ограничивается в этом случае за счет выхода на поверхность части водоизмещающих объемов и, следовательно, уменьшения сил плавучести в поднимаемой оконечности. Глубину, с которой подводная лодка может быть поднята непосредственно на поверхность, определяют по формуле
Принимая φпред=20°, получаем
где L - длина подводной лодки.
При подъеме плавучими кранами или судоподъемными судами глубина подъема может быть больше и определяется расстоянием перемещения гиней.
Ступенчатым подъемом называется подъем, который состоит из нескольких раздельных этапов (ступеней), на каждом из которых лодку поднимают на высоту, меньшую глубины ее затопления. Между этими этапами лодку буксируют в более мелководный район до покладки на грунт, после чего ее поднимают на следующую ступень.
Таким способом можно поднимать лодку и с помощью плавучих кранов, если они из-за конструктивных особенностей не обеспечивают подъема непосредственно на поверхность. Например, подводная лодка затонула на глубине 60 м, а высота подъема гака крана составляет всего 30 м. Ясно, что в этом случае лодку придется поднимать не менее чем в две ступени.
Более широкое распространение ступенчатый способ получил при подъеме понтонами. Здесь каждый этап представляет как бы непосредственный подъем на промежуточную поверхность, а значение предельного дифферента принимается равным 20°. Чтобы на каждой ступени не проводить полностью переостропку всех понтонов, их разделяют на две группы.
Первая группа понтонов, называемых основными, располагается в средней части лодки и крепится у ее корпуса. Вторая группа понтонов, называемых отрывными, размещается в оконечностях и острапливается на глубине от поверхности, равной принятой высоте ступени. Суммарные подъемные усилия отрывной группы понтонов составляют обычно около 40-50% подъемного веса лодки.
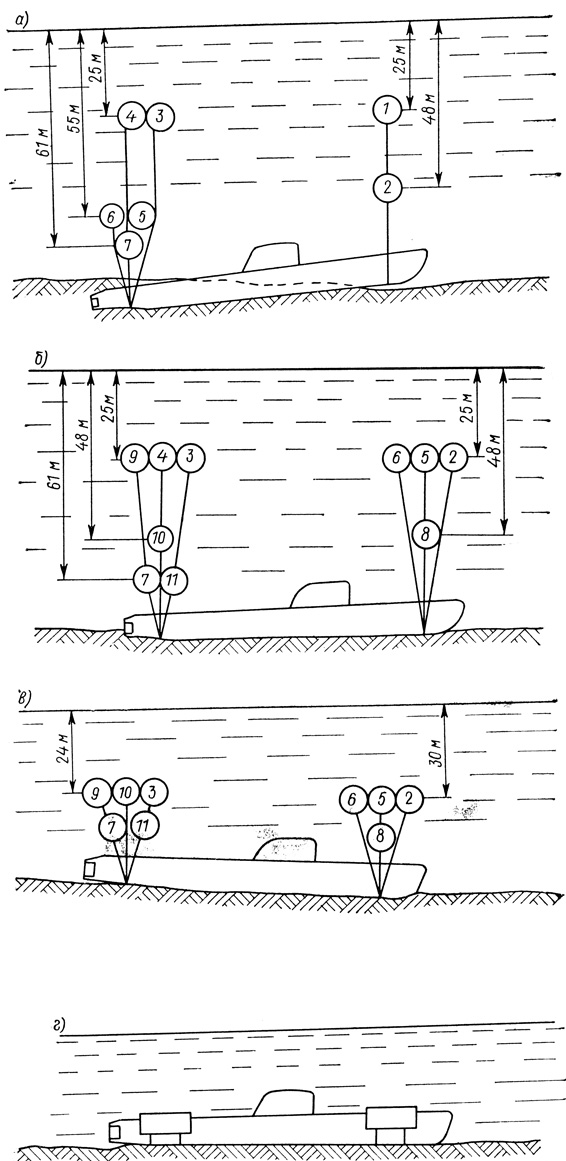
Схема подъема 'Сквалуса': а - 13 июля 1939 г.: б - 12 августа 1939 г.; в - 14-17 августа 1939 г.; г - 13 сентября 1939 г. Цифры в кружках означают номера понтонов
Применение ступенчатого способа лучше всего рассмотреть на примере подъема американской подводной лодки "Сквалус" в 1939 г., которая затонула на глубине 73 м. Несмотря на большую глубину, командование ВМС США решило поднять "Сквалус", так как она считалась одной из новейших лодок типа "Сарго" и к тому же не имела повреждений. Водоизмещение "Сквалуса" составляло 1450 т, длина - примерно 94,5 м. Работы по подъему начались 26 мая 1939 г., на следующий день после окончания спасательных работ. Подъемный вес "Сквалуса" определялся количеством воды, заполнившей четыре кормовых отсека, что составляло примерно 5900-6900 кН (600-700 тс). Исходя из этого, подъем лодки предполагали осуществить с помощью семи 80-тонных понтонов, создававших подъемные усилия 4900 кН (500 тс). Остальную часть подъемного веса решено было компенсировать продувкой цистерн главного балласта и топливных. Предельный угол дифферента приняли равным 15°, в соответствии с этим высота ступени составила около 25 м. Планировали провести подъем тремя ступенями. Из семи понтонов три отрывных, а четыре - основных (см. рис. а). Все подготовительные работы водолазы сумели выполнить за полтора месяца, и 13 июля провели первую попытку подъема.
Порядок продувки предусматривал всплытие сначала кормовой оконечности, потому что носовые обводы создавали более удобную точку вращения и опоры на грунт. Кроме того, корма была значительно тяжелее носа, и ее подъем во многом определял успех всей операции. Продувка проводилась в такой последовательности: воздух подавался в кормовую цистерну главного балласта (ЦГБ), продувалась кормовая группа понтонов, начиная с нижних, а затем топливные цистерны, расположенные в средней части лодки.
Через 5 ч после начала продувки корма благополучно всплыла. Спасатели приступили к подаче воздуха в носовую группу понтонов и цистерн. Успешное завершение операции казалось уже близким. По расчетам нос должен был всплыть после полной продувки верхнего понтона 1 и частичной продувки нижнего понтона 2 и носовой балластной цистерны № 1. Но этого не случилось. Нос не всплыл даже после полной продувки ЦГБ № 1. Во время короткого совещания решили подать воздух в ЦГБ № 2, куда на всякий случай тоже был проведен воздушный трубопровод. Осуществить полную продувку нижнего понтона инженеры не рискнули, так как носовой подъемный строп, на котором были закреплены оба понтона, оказался ослабленным в ходе работ. Вскоре после начала подачи воздуха в ЦГБ № 2 из воды показался верхний понтон, а затем неожиданно нижний и, наконец, нос подводной лодки. В этот момент из-за перегрузки оборвался один из стропов кормовой группы понтонов (6 и 7). Корма легла на грунт, а нос "Сквалуса" задрался на 6 м из воды под углом 60°. Из-за дифферента соскользнул подъемный строп носовых понтонов.
Этот драматический момент зафиксировал фотограф, и снимок впоследствии приводился во многих статьях, посвященных подъему "Сквалуса". Через некоторое время, потеряв плавучесть, носовая оконечность тоже затонула.
Итак, лодка осталась лежать на грунте в переплетениях шлангов и тросов, с тремя закрепленными к корме понтонами.
Неудача первой попытки подъема "Сквалуса" может быть объяснена следующими причинами.
Во-первых, в расчетах подъемного веса не учитывали воду, находящуюся в трех носовых отсеках, попавшую туда в ходе спасательных и судоподъемных работ. Для кормовых отсеков, наоборот, не учитывалось влияние воздушных подушек. Поэтому в результате перемещения водяного балласта при всплытии лодки точка приложения подъемного веса изменялась и поочередно оказывались легче сначала корма, затем нос.
Во-вторых, суммарное подъемное усилие отрывных понтонов составляло всего 20-25% подъемного веса лодки. Этого было явно недостаточно для компенсации расширения воздушных подушек в отсеках, основных понтонах, а также топливных и балластных цистернах.
Разборка оставшихся на грунте понтонов, тросов, шлангов и устранение повреждений, вызванных неудачным подъемом, заняли весь июль. Вторую попытку поднять лодку предприняли только 12 августа. На этот раз постарались учесть все ошибки и количество отрывных понтонов увеличили в 2 раза (см. рис. б). Операция завершилась успешно - "Сквалус" подняли и перевели на глубину 49 м. Здесь уже работы пошли быстрее.
В период с 14 по 17 августа отрывные понтоны опустили вниз. При этом из-за неудачной покладки на грунт нос оказался на 6 м ниже кормы, и носовую группу понтонов пришлось остропить на глубине 30 м вместо 24 м, предусмотренных проектом. Один из понтонов кормовой группы (№ 4) оказался лишним, и его отправили в порт. Утром 17 августа лодку подняли на вторую ступень (см. рис. в), а уже вечером "Сквалус" находился на глубине 28 м на расстоянии 1,6 мили от маяка о. Уайт. С этой глубины лодку можно было поднимать непосредственно на поверхность. Подготовительные работы заняли около двух недель.
Подъем предполагалось провести путем отжатия воды из затопленных отсеков и продувки балластных и топливных цистерн. В корме для создания дополнительной плавучести остропили по бортам два 80-тонных понтона. Но при всплытии носа появился крен, в результате чего из балластных цистерн выходил воздух, и лодка опять опустилась на грунт. Тогда попробовали поднять корму, чтобы выровнять крен с помощью понтонов. Но при ее подъеме оставшаяся в отсеках вода переместилась в нос, и подъемных усилий балластных цистерн для его всплытия оказалось недостаточно.
Пришлось для окончательного подъема на поверхность остропить два 80-тонных понтона и в носовой части (см. рис. г). Только после этого удалось поднять "Сквалус" и отбуксировать в порт.
Из приведенного описания работ со "Сквалусом" становятся очевидны сложность и трудоемкость ступенчатого способа подъема. Поэтому внимание специалистов было направлено на поиски путей сокращения подводных работ, на разработку новых способов подъема кораблей. Один из таких способов - зигзагообразный - предложил в начале 30-х годов корабельный инженер ЭПРОНа В. Ф. Кюнстлер [42, с. 88].
Зигзагообразный способ подъема заключается в последовательном подъеме на некоторую высоту каждой из оконечностей корабля, вплоть до выхода его на поверхность. Так же как oн ступенчатый, он состоит из нескольких этапов, но все они следуют непрерывно один? за другим без промежуточной покладки корабля на грунт. В ходе подъема на каждом этапе, кроме последнего, всплывающая оконечность поднимается выше, чем перед этим была поднята другая. Поэтому в процессе подъема дифферент корабля несколько раз меняет свой знак, не превышая, однако, заранее заданного значения.
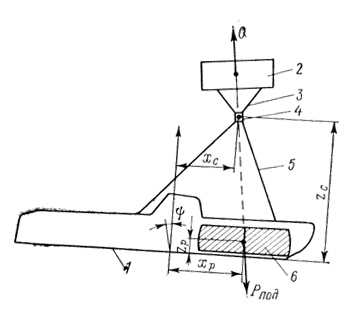
Неуправляемый бесступенчатый подъем подводной лодки. 1 - лодка; 2 - понтон; 3 - понтонные стропы; 4 - соединительная планка; 5 - расходящиеся стропы; 6 - затопленные отсеки
Впервые этот способ успешно применили при подъеме машинного отделения эсминца "Керчь" в 1932 г. с глубины 27 м. Эта часть корабля была короткой, но тяжелой. Грузоподъемности имеющихся кранов оказалось недостаточно, поэтому для подъема использовали два 400-тонных понтона и семь мягких 40-тонных понтонов, которые расположили по высоте в несколько ярусов. Расстояние между мягкими понтонами выбрали с таким расчетом, чтобы угол дифферента при подъеме не превышал 16° [42, с. 61].
Неуправляемый бесступенчатый подъем подводной лодки. 1 - лодка; 2 - понтон; 3 - понтонные стропы; 4 - соединительная планка; 5 - расходящиеся стропы; 6 - затопленные отсеки
При зигзагообразном способе подъема подводных лодок целесообразно одновременно применять плавучие краны или судоподъемные суда и понтоны. В этом случае к одной оконечности лодки следует закрепить стропы гиней судна, а к другой - судоподъемные понтоны. Сначала до установленного угла дифферента φпред≤20° лодку поднимают гинями судна, затем продувают отрывной понтон до всплытия на поверхность, потом опять поднимают гинями и полностью продувают "основные" понтоны. Заключительный подъем на поверхность выполняет судоподъемное судно.
Рассматривая уже известную формулу (17) для угла статического дифферента
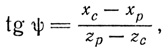
можно заметить, что для уменьшения дифферента следует или сократить до минимума разность (xc - xp) абсцисс точек приложения подъемного веса и подъемных усилий, или увеличить разность (zp - zc) аппликат этих точек, т. е. повысить центр приложения сил плавучести.
В неуправляемом бесступенчатом подъеме используется второй способ.
Подъемные стропы закрепляются к подводной лодке таким образом, чтобы точка приложения подъемного веса заведомо находилась между ними. Обратные концы стропов соединяются специальной планкой, к которой закреплены понтонные стропы понтона большой грузоподъемности. При такой остропке вертикаль, соединяющая точки приложения подъемного веса и подъемных усилий, будет всегда проходить через соединительную планку, которую и можно принять за центр сил плавучести.
Ошибки в определении значения Pпод и абсциссы xp будут влиять только на усилия в подъемных стропах, которые следует выбирать с соответствующим запасом прочности.
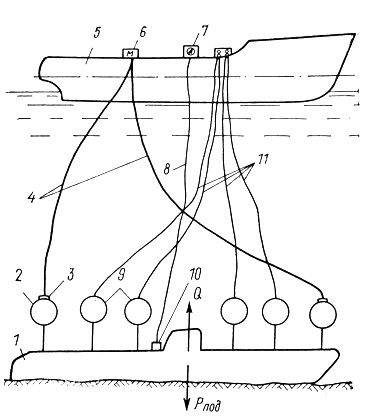
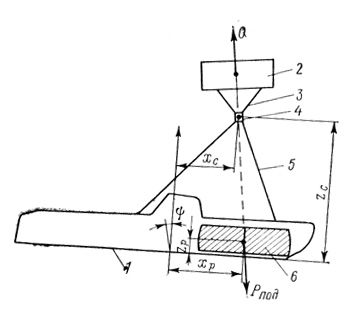
Управляемый бесступенчатый подъем подводной лодки. 1 - затонувшая подводная лодка; 2 - концевые понтоны; 3 - травящие клапаны; 4 - воздушные шланги травящих клапанов; 5 - судоподъемное судно; 6 - манипулятор управления травящими клапанами; 7 - дифферентометр - глубиномер; 8 - кабель дифферентометра; 9 - понтоны средней группы; 10 - датчик дифферентометра; 11 - шланги средней группы понтонов
При управляемом бесступенчатом подъеме ограничение угла дифферента достигается за счет уменьшения сил плавучести понтонов в той оконечности лодки, которая всплывает быстрее. Таким образом, в этом случае угол дифферента регулируется разностью (xc - xp) абсцисс подъемного веса и подъемных усилий. Уменьшают силы плавучести самым простым способом - выпуская излишек воздуха через специальные травящие клапаны. Схема размещения понтонов и аппаратуры управления всплытием показана на рисунке. Подача воздуха в понтоны при управляемом бесступенчатом подъеме производится в следующем порядке:
- полностью продувают концевые понтоны с травящими клапанами;
- симметрично, начиная от оконечности, продувают понтоны средней группы до отрыва лодки от грунта;
- вытравливают часть воздуха из концевого понтона всплывающей оконечности до обратной покладки лодки на грунт.
Так же поступают при каждом последующем нарастании дифферента, пока лодка не начнет всплывать, сохраняя начальный дифферент.
Как управляемый, так и неуправляемый способы бесступенчатого подъема лодок на практике пока не применялись, но заложенные в них идеи представляют несомненный интерес для специалистов судоподъема.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'