Поиск проводит "Мизар"
Из всего комплекса исследований и разработок, проводимых ВМС США с целью развития подводной техники,, целесообразно выделить два направления. Первое из них - это создание глубоководных аппаратов для выполнения поисковых, спасательных и других работ с затонувшими объектами. Второе - разработка буксируемых комплексных поисковых устройств.
Через 15 лет после гибели "Трешера" в распоряжении ВМС США насчитывалось уже семь автономных подводных аппаратов для поисково-спасательных и исследовательских работ (табл. 1). За исключением "Триеста", все аппараты были построены после 1963 г. [65]. Батискаф "Триест", закончив поисковые работы с "Трешером", прошел модернизацию, во время которой заменили прочную сферу, увеличили высоту надводного борта до 0,6 м и расширили палубу. В результате значительно улучшились его мореходные качества. Основное назначение батискафа "Триест-П", так же как исследовательского подводного аппарата - лодки "NR-1" с атомной энергетической установкой, заключалось в проведении океанографических и поисковых работ в интересах ВМФ США.
В 1964-1969 гг. для выполнения подводных работ самого широкого профиля на глубинах до 2000 м в США построили три глубоководных аппарата: "Алвин", "Тартл" и "Сиклифф". Первый из них назвали в честь известного американского океанографа Аллена Вайна. Сначала "Алвин" принадлежал Океанографическому институту в Вудс-Холе, но в 1966 г. после потери американским стратегическим бомбардировщиком "Б-52" водородной бомбы в районе Паломареса (Испания) военно-морской флот США затребовал аппарат в свое распоряжение. "Алвин" вместе с другими подводными аппаратами успешно справился с поиском и подъемом бомбы, и после этого перешел в совместное владение ВМС США и Вудс-холского института.
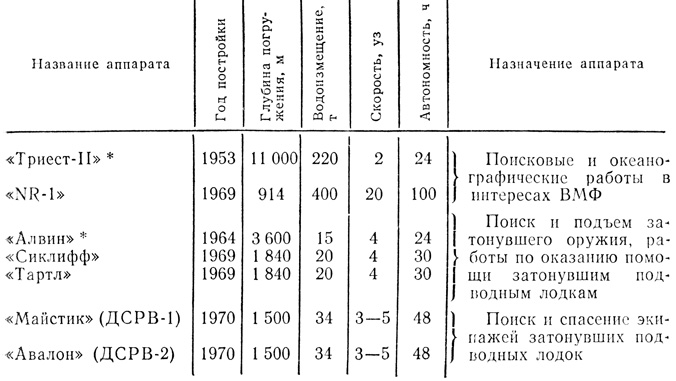
Таблица 1. Характеристики подводных автономных аппаратов ВМС США
* (Приведены характеристики модернизированных аппаратов.)
При постройке "Алвина", опасаясь возможных неудач при испытаниях, строительная фирма изготовила сразу три сферических корпуса из высокопрочной стали. Но уже первый из них благополучно выдержал положенные испытания давлением. После успешных действий "Алвина" на практике ВМС США решили построить еще два аппарата, используя уже изготовленные корпусы. Так появились "Тартл" и "Сиклифф", водоизмещение которых несколько превышало водоизмещение "Алвина" за счет дополнительного оборудования. В начале 70-х годов на "Алвине" (после его аварии, о которой сказано ниже) поставили новый титановый корпус, в результате чего глубина погружения аппарата увеличилась с 1840 до 3600 м. В дальнейшем планируется модернизировать аппараты "Тартл" и "Сиклифф".
Особо следует остановиться на глубоководных аппаратах "Майстик" и "Авалон". Создание их - результат дальнейшего развития метода спасения экипажей подводных лодок с помощью спасательных колоколов Маккена, находившихся на снабжении спасательных судов ВМС США с 30-х годов. Колокол Маккена требовал обязательной постановки и надежного удержания судна над затонувшей лодкой для спуска водолазов с целью закрепления троса колокола за входной люк лодки.
На это даже при благоприятных условиях требуется обычно 6-10 ч. Например, при спасении экипажа "Сквалуса" установка судна "Фалкон" заняла 6 ч, а присоединение троса и спуск колокола еще 3 ч. В результате первых подводников смогли вывести из лодки только через 28 ч после аварии, когда условия в отсеках уже приближались к критическим.
В 1953 г. при спасении турецкой подводной лодки "Думлупынар" (была передана Турции по плану Маршалла), затонувшей в Мраморном море на глубине 84 м водолазы из-за сильного течения вообще не смогли закрепить направляющий трос колокола. Все 83 члена экипажа погибли, несмотря на то, что спасательное судно было установлено над лодкой через 12 ч после аварии.
Аппараты "Майстик" и "Авалон" не требуют ни установки спасательного судна над лодкой, ни спуска водолазов. Более того, эти аппараты автономные и могут быть доставлены в район аварии на любом судне или даже самолете. Наиболее вероятным способом доставки, который отрабатывается на ежегодных тренировках, считается комбинированный: в ближайшую к району аварии военно-морскую базу аппарат транспортируется самолетом, а непосредственно в заданную точку - на подводной лодке. Оба аппарата базируются в военно-морской базе Сан-Диего*.
* (В мае 1979 г. у берегов Шотландии проводились американо-английские учения по спасению экипажей подводных лодок с глубины 120 м. В них участвовал подводный аппарат "Авалон", который за 19 ч доставили самолетом из Сан-Диего в Глазго. - Sea Technology, 1979, N 11, p. 27.)
Для поиска затонувших подводных лодок на "Майстике" и "Авалоне" установлены многочисленная гидроакустическая аппаратура и оптические системы. Наиболее важные из них - гидрофоны направленного шумопеленгования, предназначенные для наведения аппарата на аварийную лодку по акустическим сигналам. Если лодка таких сигналов не производит, то используются установленные в носовой части гидролокаторы горизонтальной и вертикальной направленности. У первого угол обзора составляет 60°, второй может наклоняться на +45° для того, чтобы компенсировать углы дифферента аппарата вовремя маневрирования при подходе к лодке. Можно отметить также эхолоты новой конструкции, показывающие как глубину погружения, так и расстояние до дна.
Спасательные аппараты, так же как и колокола Маккена, присоединяются к входному люку подводной лодки с помощью специальной камеры присоса. Направляющий трос закрепляется манипулятором, за действием которого наблюдает через иллюминаторы оператор. В камере присоса размещены также гидролокатор ближнего действия для наблюдения в мутной воде, телевизионная камера и подводные светильники. За один спуск аппарата может быть спасено 24 подводника. Подобные аппараты в 70-х годах построены во многих странах [1, с. 118-123].
Интересны результаты, достигнутые ВМС США в области создания буксируемых комбинированных поисковых устройств. Первое из них появилось уже через год после гибели "Трешера". Основная задача, которую ставили перед собой ученые и инженеры, заключалась в том, чтобы обеспечить одновременный прием сигналов от гидролокатора и магнитометра. В этом случае ложные контакты первого сразу проверяет второй. Ученые считали, что главное достоинство гидролокаторов - высокую скорость обследования - удастся сохранить и в новом устройстве. Хотя заранее пришлось примириться с тем, что дальность действия прибора, который назвали "Фиш" (рыба), останется на уровне магнитометра. Но практика сразу показала, что скорость буксировки нового прибора не превышает 3-4 уз, т. е. и эта характеристика ближе к характеристике магнитометра.
В соответствии с поставленными задачами устройство "Фиш" состоит из следующих основных частей:
- двух гидролокаторов бокового обзора с шириной полосы поиска 750 м при разрешающей способности 0,5 м;
- протонного магнитометра чувствительностью 0,5 у при ширине полосы поиска 120 м;
- трех глубоководных фотокамер Эджертона с импульсными ксеноновыми светильниками мощностью по 500 Вт. При этом затворы фотокамер включаются синхронно с лампами светильников по сигналам магнитометра;
- детектора ионизирующих излучений.
Все части устройства размещаются в рамном металлическом контейнере, выполненном из немагнитных материалов, а датчик магнитометра располагается на конце 2,5-метровой пластмассовой штанги. Габариты контейнера - 2500 X 900 X 900 мм.
Устройство буксируется на расстоянии 7-10 м от грунта с помощью коаксиального кабеля-троса длиной около 6000 м и диаметром 17 мм. Разрывная прочность кабеля - 157 кН (16 тс). Полученная информация передается на судно-носитель по шести независимым каналам кабеля. В обратном направлении подается электрическая энергия, необходимая для питания аппаратуры. Общая масса буксируемого устройства с размещенным на нем оборудованием составила 450 кг, не считая -свинцового балласта массой 1 т, обеспечивающего устойчивость движения контейнера. Устройство можно применять на глубинах до 6000 м, при этом высота над грунтом регулируется изменением длины вытравленного кабеля. Регулировка производится автоматической лебедкой по данным эхолота, размещенного в контейнере и имеющего индикатор на судовом пункте управления.
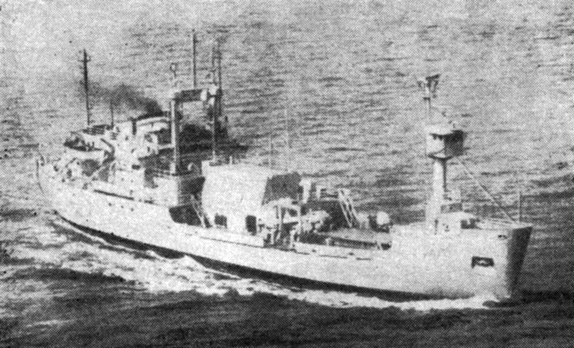
Исседовательское судно 'Мизар'
Устройство "Фиш" установили в 1964 г. на транспортном судне "Мизар", переоборудованном в исследовательское судно. В центральной части "Мизара" вырезали специальную шахту размером 3 X 7 м и установили лифт-подъемник для спуска и Подъема буксируемого контейнера. Такое размещение спуско-подъемного устройства обеспечивало возможность выполнения работ при значительной бортовой и килевой качке судна.
Первые испытания устройства проводились при повторном поиске подводной лодки "Трешер" в мае 1964 г. Вместе со спасательным судном "Хойст" и модернизированным батискафом "Триест-Н" судно "Мизар" в течение нескольких месяцев обследовало район гибели лодки. Были получены новые снимки обломков корпуса, в том числе с помощью устройства "Фиш", которое во время этих испытаний оказалось эффективнее батискафа.
В феврале - апреле 1966 г. "Мизар" принимал активное участие в поисках водородной бомбы в Средиземном море у берегов Испании. Как известно, после длительных поисков бомбу обнаружили с помощью аппарата "Алвин", а остропили ее с помощью подводного телеуправляемого аппарата КУРВ. На поверхность бомба была поднята спуско-подъемным устройством судна "Мизар".
Через два года уже сам "Алвин" попал в беду. При спуске на воду в октябре 1968 г. в районе мыса Кейп-Код аппарат сорвался с палубы обеспечивающего судна и затонул на глубине 1540 м, к счастью, без экипажа. Работы по подъему "Алвина" удалось организовать только через год, так как в конце 1968 г. "Мизар" был занят поисками затонувшей американской атомной подводкой лодки "Скорпион".
8 июня 1969 г. "Алвин" сфотографировали камерами устройства "Фиш". После изучения полученных фотографий специалисты разработали план подъема, предусматривающий постановку в открытый люк "Алвина" Т-образной траверсы с подъемным тросом. Эту работу выполнил подводный аппарат "Алюминаут", ранее участвовавший вместе с "Алвином" в поисках водородной бомбы в районе Паломареса.
К спущенной на глубину траверсе прикрепили гидроакустический маяк-излучатель и импульсный светильник, по которым "Алюминаут" сориентировался на подъемную систему и заложил траверсу в люк аппарата. Поднял "Алвин" на поверхность "Мизар" через свою центральную шахту.
Наконец, в апреле 1970 г. "Мизар" помог обнаружить подводную лодку "Эридис", с описания гибели которой начиналась эта глава. По просьбе правительства Франции "Мизар" приступил к поискам 12 апреля, т. е. через 40 дней после гибели лодки. Площадь района поиска составляла 4 кв. мили (14 кв. км) с центром в точке обнаружения маслянистого пятна. Ежедневно "Мизар" обследовал по 0,5 кв. мили (1,75 кв. км). Из-за плохой погоды поиск растянулся на две недели, и только 26 апреля был зафиксирован значительный магнитный контакт. Расчеты показывали, что ферромагнитный объект должен находиться на расстоянии 45 м от датчика аппаратуры. В последующие шесть дней обнаружили части корпуса "Эридис", находившиеся на грунте на глубине 1100 м. Дальнейшее обследование обломков подводной лодки и их фотографирование выполнял французский батискаф "Архимед".
Приведенные примеры использования "Мизара" с устройством "Фиш" свидетельствуют о довольно широких возможностях комбинированных поисковых систем. С их помощью обследование можно проводить на любой глубине и с достаточно высокой скоростью даже в районах со сложными гидрологическими и геологическими условиями. Поэтому в настоящее время наибольшие трудности возникают при определении хотя бы приблизительного места гибели лодки, так как они могут плавать практически неограниченное время в любых районах, даже подо льдом. Частично эту задачу помогают решать стационарные гидроакустические средства наблюдения за подводной средой, эффективность которых была подтверждена в 1968 г. при поиске американской подводной лодки "Скорпион".
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'