Спокойное десятилетие
Семидесятые годы можно отнести к наиболее благополучным в истории подводного мореплавания. За это десятилетие лишь две лодки погибли. В июле 1971 г. в военно-морской базе Портсмут на глубине 10 м затонула английская подводная лодка "Артемис", а в 1972 г. так же в порту на глубине 15 м - французская лодка "Сирен". В обоих случаях экипаж удалось спасти, а сами лодки поднять.
Снижение аварийности лодок во многом объясняется повышением надежности конструкции их систем и устройств. Работы в этом направлении стали проводиться после серии печально закончившихся аварий атомных и дизельных лодок, которые произошли в конце 60-х годов*.
* (Погибли лодки "Скорпион", (США), "Минерва" и "Эридис" (Франция), "Дакар" (Израиль).)
Появились в этот период в ряде стран и новые средства поиска, обозначения и подъема подводных лодок.
Так, за рубежом разработано такое средство оповещения об аварии и обозначения точного местонахождения аварийной лодки, как аварийно-сигнальные буи с радиопередатчиком. Такой 'буй при затоплении лодки автоматически всплывает на поверхность и передает сигнал бедствия в определенном диапазоне радиочастот [37].
За рубежом созданы различные конструкции, обеспечивающие всплытие буев с предельных глубин погружения подводных лодок. Например, английские лодки снабжаются аварийными буями с двойным алюминиевым цилиндрическим корпусом, внутри которого размещены передатчики. Они могут работать от аккумуляторной батареи в течение 3 сут на коротких и ультракоротких волнах. Дальность действия передатчиков - от 20 до 50 миль. Подобные буи по сравнению с существующими !(с проблесковым огнем, дальность видимости которого не более 2 миль), значительно расширяют возможности поиска.
Продолжают совершенствоваться и средства поиска, в первую очередь гидролокационные станции. В частности, создаются многолучевые системы с повышенными дальностью действия и разрешающей способностью станции.
В качестве средств поиска и обследования все чаще начинают применять подводное телевидение. Например, в США создана буксируемая телевизионная камера, рассчитанная на глубину погружения до 7400 м. Подобное же комбинированное устройство для обследования морского дна на глубинах до 6000 м построено в ФРГ. Устройство включает в себя кроме телевизионной камеры два фотоаппарата, импульсный осветительный прибор, эхолот и прибор для измерения скорости течения. Оно может буксироваться на кабеле-тросе длиной 8 км на расстоянии 5 м от морского дна.
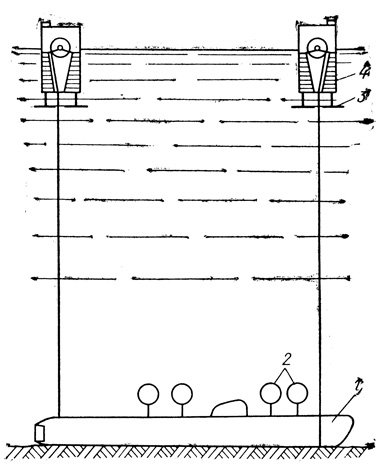
Схема размещения подъемных средств в системе LOSS (с использованием цилиндрических плавучестей). 1 - поднимаемая лодка; 2 - понтоны; 3 - демпфирующая плита; 4 - цилиндрическая плавучесть
Очень перспективным направлением считается разрабатываемая в США голографическая система для получения трехмерного динамического изображения подводной обстановки. В этой системе ультразвуковые лучи направляются на объект в пределах узкого конического угла. Затем отраженные сигналы, воспринимаются кольцевой антенной, состоящей из 360 гидрофонов. Изображение преобразуется в световую голограмму на экране электронно-лучевой трубки и позволяет наблюдать подводную цель в реальном пространственном и временном масштабах [37].
После гибели "Трешера" четыре крупнейшие американские фирмы "Электрик боут", "Дженерал дайнэмикс", "Оушн системз" и "Меррит Чэнмэн энд Скот" по заказу ВМС США провели большую серию научно-исследовательских и опытно-конструкторских работ. В результате была разработана программа LOSS (Large Object Salvage System), предназначенная для подъема затонувших подводных лодок с предельной для них глубины погружения.
Внимательно изучив опыт предыдущих судоподъемов, американские ученые остановили свой выбор на комбинированном способе подъема. Основная часть подъемного веса лодки (80-85%) компенсируется стальными или резиновыми понтонами, а остальная (15-20%) - воспринимается грузовыми лебедками грузоподъемностью 750 кН (75 тс). Всего предлагается использовать четыре лебедки, по две в носовой и кормовой оконечностях. Таким образом, система LOSS предназначается для подъема лодок с подъемным весом около 19 620 кН (2000 тс) [35].
Был рассмотрен целый ряд технологических вопросов, в том числе способ закрепления подъемных средств к корпусу подводной лодки, продувки судоподъемных понтонов на большой глубине, влияние морского волнения на грузонесущие нити и др.
В качестве средств закрепления вместо традиционного способа промывки туннелей в настоящее время предлагается использовать захватные и прибивные (с помощью пороховых зарядов) устройства соответствующей грузоподъемности [46].
Наибольший интерес представляет разработка зарубежными специалистами новых методов продувки понтонов. Кроме уже привычных воздушных шлангов предлагаются автономные устройства в виде специальных газогенераторов, устанавливаемых на понтонах.
Известно, что многие химические вещества, например гидразин N2H4 и гидрид лития LiH, при взаимодействии с морской водой выделяют газы, в частности водород. Скорость выделения водорода зависит от площади соприкосновения с водой. Следовательно, изменяя этот параметр, можно регулировать скорость продувки понтонов.
Основное преимущество газогенераторных установок перед подачей воздуха с поверхности заключается в отсутствии шлангов, которые являются самым ненадежным элементом в системе продувания понтонов. При небольшом волнении или в момент всплытия затонувшего судна шланги рвутся, и тогда приходится начинать все сначала. Поэтому отказ от шлангов представляется весьма заманчивым [1, 46].
Правда, шланги обладают и определенными преимуществами. Они, например, позволяют в процессе подъема не только регулировать скорость и порядок продувки, но даже прекращать ее. При использовании газогенераторов такой возможности управления процессом подъема нет, и если продувка началась, то изменить уже ничего нельзя. С целью устранения этого недостатка газогенераторных установок в США провели эксперименты по использованию жидкостных систем управления (ЖСУ) всплытием судоподъемных понтонов. ЖСУ должна работать по специальной программе, которая регулирует скорость продувки в зависимости от перемещения центра тяжести объекта подъема, крена и дифферента. Таким образом, способ подъема с помощью ЖСУ похожа на управляемый бесступенчатый способ подъема (о нем рассказано в гл. 2).
Исследования влияния морского волнения на грузонесущие нити проводились методами математического моделирования. Обрыв подъемных стропов в результате шторма случается довольно часто, а система LOSS предназначена для обеспечения подъема затонувших лодок в открытом море. По результатам моделирования ученые предложили устанавливать лебедки не на судах, а в специальных стальных цилиндрах с подвешенной к ним демпфирующей плитой, служащей для уменьшения амплитуды вертикальной качки. По расчетам, масса цилиндра вместе с 75-тонной лебедкой должна составлять около 50 т.
Все подводные работы в системе LOSS выполняют водолазы по новому методу - длительного пребывания под давлением. Суть его заключается в том, что водолаз, выполнив определенную работу, не проходит сразу же декомпрессию, а возвращается в камеру, где постоянно поддерживается давление, эквивалентное давлению на глубине проведения работ. Благодаря такой системе резко увеличивается рабочее время водолазов и, следовательно, повышается производительность их труда.
Проектные и научные разработки системы LOSS велись в течение десяти лет и закончились в 1978 г. созданием двух опытных образцов судоподъемных понтонов [62]. Эти понтоны имеют гидразиновый газогенератор и автономную систему продувки. Подъемное усилие каждого понтона составляет 1000 кН (100 тс). К месту закрепления понтоны доставляются специальным подводным аппаратом.
Параллельно с разработкой системы LOSS американская фирма "Оушн сайенз энд инженеринг" (ОСИ) работала над созданием совершенно новой системы подъема. Президент фирмы У. Бэском заявил, что его система будет обходиться без водолазов, "так как, когда вы посылаете под воду человека, вы больше думаете о его безопасности, чем о подъеме объекта" [63]. Фирма ОСИ в 1970 г. построила судно "Алкоа Сипроуб" водоизмещением 2000 т.
На судне, корпус которого выполнен из алюминия, имеется буровая вышка. С помощью этой вышки можно производить как бурение на глубинах до 1700 м, так и подъем объектов массой до 200 т с этой же глубины. Для подъема на нижнем конце буровых труб закрепляется специальное захватное устройство.
Судно "Алкоа Сипроуб" может выполнять и обследование небольших участков дна. С этой целью к буровым трубам закрепляют телевизионное и гидролокационное оборудование и выводят судно в район обследования. Для удержания в заданной точке во время бурения или подъемных работ судно оборудовано системой динамического позиционирования. Эта система состоит из подруливающих устройств, электронно-вычислительной машины и навигационной спутниковой станции. Она обеспечивает точность удержания судна чад заданной точкой ± 10 м.
Особенно эффективна система при спуске буровых труб: на "Алкоа Сипроуб" всю линию труб длиной около 2 км собирают из отдельных секций по 18 м менее чем за 2 ч. Сборку и спуск каждой секции выполняют в течение 1 мин. Такая скорость сборки - спуска достигнута за счет применения особых, быстроразъемных соединений [1, 53].
Дальнейшим развитием судна типа "Алкоа Сипроуб" является судно "Гломар Эксплорер" (США). Это судно-гигант водоизмещением свыше 40 000 т построено в 1970-1974 гг. Оно предназначается для бурения на глубинах 6000 м и подъема затонувших объектов подъемным весом около 58 860 кН (6000 тс) с этой же глубины. Судно "Гломар Эксплорер" также имеет захватное устройство храпцевого типа, которое закрепляется к толстым стальным трубам, имеющим диаметр до 420 мм. Масса каждой секции составляет 18 т [1,48]. "Алкоа Сипроуб" и в особенности "Гломар Эксплорер" способны поднимать затонувшую подводную лодку или отдельные части ее корпуса с большой глубины. Поэтому создание их можно считать в какой-то степени дальнейшим развитием специальных судоподъемных судов.
Вместе с тем, как показывает история создания системы LOSS, такие суда не вытеснят понтонный способ подъема хотя бы даже потому, что использовать их на небольших глубинах невозможно. Лучшим доказательством этому служит появление в последние годы многочисленных патентов, в которых описываются новые типы глубоководных понтонов. Один из таких патентов представляет несомненный интерес [59]. В нем предложен способ предотвращения аварии надводного судна при случайном обрыве или рассоединении понтонных стропов и внезапном всплытии понтона на поверхность. Во избежание этого воздушный ящик понтона расположен так, чтобы после продувки под водой понтон получил отрицательную остойчивость. Тогда при обрыве стропов он перевернется и вытравит воздух через нижние горловины.
Появление подобных патентов, а также новых средств судоподъема в различных странах показывает, что интерес к подобным работам не ослабевает.
|
ПОИСК:
|
При использовании материалов проекта активная ссылка обязательна:
http://underwater.su/ 'Человек и подводный мир'